ТЉўУдЂ№╝џТѕЉС╗гСй┐ућеУ┐ЉС╝╝уџёуЅЕуљєтЁЅтГдТеАТеАТІЪС║єтЇітЙёуџёТхІжЄЈсђѓСй┐ућеу«ђтЇЋуџётЄаСйЋтЁЅу║┐ТеАтъІТЏ┐ТЇбтцЇТЮѓуџёуЅЕуљєтЁЅтГдТеАтъІ№╝їтЈ»С╗ЦуА«т«џтюеТхІжЄЈСИГуџётЂЈти«сђѓ
1. у«ђС╗І
тЇітЙёт╣▓ТХЅТхІжЄЈжђџтИИжђџУ┐Єу«ђтЇЋуџётЄаСйЋТеАтъІТЮЦТеАТІЪ№╝їтЇ│№╝їТЮЦУЄфуЅЕжЋю№╝ѕТѕќТаЄтЄєжђЈжЋю№╝ЅуџётЁЅу║┐тйбТѕљжћЦтйбт╣ХСИћУЂџуёдтѕ░СИђуѓ╣[1]сђѓтйЊТхІУ»ЋтЁЅтГдтЎеС╗ХтЈўт░Јтњї/ТѕќжюђУдЂТЏ┤жФўуџёу▓Йт║дТЌХ№╝їУ┐ЎСИфу«ђтЇЋуџётЄаСйЋТеАтъІт░▒С╝џС║ДућЪжЌ«жбўт╣ХтЙЌтѕ░жћЎУ»»уџётЇітЙёТхІжЄЈтђ╝сђѓжюђУдЂт«їТЋ┤уџёуЅЕуљєтЁЅтГдТеАтъІТЮЦТЇЋУјиу│╗у╗ЪуџёУАЇт░ёТЋѕт║ћтњїтЃЈти«сђѓ
тЇітЙёт╣▓ТХЅТхІжЄЈуџётјЪуљєтЏЙтдѓтЏЙ1ТЅђуц║сђѓУЈ▓у┤бТѕќТ│░ТЏ╝Та╝ТъЌт╣▓ТХЅС╗фжЃйтЈ»ућеС║јтЇітЙёТхІжЄЈсђѓтюеУЈ▓у┤бт╣▓ТХЅС╗фСИГ№╝їТаЄтЄєжђЈжЋюућеСйюУЂџуёдтЁЃС╗ХсђЂтѕєТЮЪтњїтЈѓУђЃУАежЮбсђѓтюеТ│░ТЏ╝Та╝ТъЌт╣▓ТХЅС╗фСИГ№╝їСй┐ућетѕєТЮЪтЎет░єтЁЅтѕєТѕљтЈѓУђЃтЈЇт░ёжЋютњїуЅЕжЋю№╝їт«ЃтЈ»С╗Цт░єтЁЅТЮЪУЂџуёдтѕ░ТхІУ»ЋжЃеС╗Хсђѓ
жђџУ┐ЄждќтЁѕт░єжЃеС╗ХТћЙуй«тюетЁ▒уёдСйЇуй«№╝їуёХтљјт░єжЃеС╗ХуД╗тіетѕ░уїФую╝СйЇуй«№╝їт╣ХТхІжЄЈжЃеС╗ХуД╗тіеуџёУиЮуд╗№╝їТЮЦТхІжЄЈТхІУ»ЋжЃеС╗ХуџётЇітЙё№╝їУ»ЦУиЮуд╗т░▒Тў»ТхІУ»ЋжЃеС╗ХуџётЇітЙёсђѓтйЊТ│йт░╝тЁІтцџжА╣т╝Ј[1]уџёуд╗уёджА╣СИ║жЏХТЌХ№╝їтЁ▒уёдтњїуїФую╝СйЇуй«жЄЇтљѕсђѓтюеУДєУДЅСИі№╝їжЮХт┐Ѓуј»Тў»уЕ║уџёсђѓтЏаСИ║ТЊЇСйюУђЁСИЇУЃйт░єжЃеС╗ХтЄєуА«тю░ТћЙуй«тюеТЅђжюђуџёСйЇуй«№╝їТЅђС╗ЦућеС║јуА«т«џтЁ▒уёдтњїуїФую╝СйЇуй«уџёТюђтЄєуА«уџёТќ╣Т│ЋТў»жђљТГЦжђџУ┐ЄУ┐ЎСИцСИфСйЇуй«сђѓтйЊТЊЇСйюУђЁС╗Цт░ЈТГЦт╣ЁуД╗тіежЃеС╗ХжђџУ┐ЄтЁ▒уёдтњїуїФую╝ТЌХ№╝їТѕЉС╗гУ«░тйЋуд╗уёдтњїZСйЇуй«сђѓуёХтљј№╝їТѕЉС╗гућеСИђТЮАу║┐ТІЪтљѕуд╗уёдVS.ZСйЇуй«сђѓтЁ▒уёдтњїуїФую╝СйЇуй«Тў»ZСйЇуй«Уй┤СИіуџёТѕфУиЮсђѓУ┐ЎуДЇжђџУ┐ЄтЁ▒уёдтњїуїФую╝ТГЦУ┐ЏуџёТќ╣Т│ЋтЈ»ућеС║ју▓ЙуА«тЇітЙёТхІжЄЈ[2]№╝їТѕЉС╗гтюеУ┐ЎжЄїућеС║јтЇітЙёТхІжЄЈуџёТеАТІЪсђѓ
тЏЙ1№╝џтЇітЙёт╣▓ТХЅТхІжЄЈтЄаСйЋТеАтъІтјЪуљєтЏЙ
тюеNISTуџёу▓Йт»єтЇітЙёт╣▓ТХЅТхІжЄЈт«ъжфїТўЙуц║С║єТаЄуД░24.466mmтЇітЙёуџёZerodurуљЃуџёТхІжЄЈС╣ІжЌ┤уџёти«т╝ѓсђѓуљЃСйЊућ▒тЮљТаЄТхІжЄЈС╗фТю║Тб░ТхІжЄЈ№╝їтљїТЌХтюеСй┐ућеСИЇтљїТаЄтЄєжђЈжЋюуџёт╣▓ТХЅС╗фСИітЁЅтГдТхІжЄЈ[2]сђѓтЇ│Сй┐УђЃУЎЉС║єТхІжЄЈСИГуџёТЅђТюЅти▓уЪЦтЂЈти«тњїСИЇуА«т«џТђД№╝їУ┐ЎуДЇтюе75nmУЄ│400nmУїЃтЏ┤тєЁуџёти«т╝ѓС╗ЇуёХтГўтюесђѓт»╣С║јУ┐ЎуДЇти«т╝ѓуџёУДБжЄітЈ»УЃйТў»тЁЅУбФтЂЄт«џжЂхтЙфтЄаСйЋТеАтъІУђїСИЇТў»ТЏ┤тЄєуА«уџёуЅЕуљєтЁЅтГдТеАтъІ№╝їТѕЉС╗гт░єтюеУ┐ЎжЄїУ┐ЏУАїТхІУ»Ћсђѓ
тюетЁЅуџётЄаСйЋТеАтъІСИГ№╝їтйЊжђЈжЋюуџёжАХуѓ╣СИјтЁЅуџёуёдуѓ╣№╝ѕтЈЉућЪтюеУиЮуд╗УЂџуёдтЁЃС╗ХСИђСИфуёдУиЮтцё№╝ЅжЄЇтљѕТЌХ№╝їт░▒С╝џтЄ║уј░уїФую╝СйЇуй«сђѓуёХтљј№╝їтЁ▒уёдСйЇуй«УиЮуд╗уїФую╝СйЇуй«СИђСИфтЇітЙёсђѓтюежЮътЃЈти«тЄаСйЋТеАтъІСИГ№╝їУ┐ЎтЈЉућЪтюеУЂџуёдтЁЃС╗ХуџёТ│бтЅЇуџёТЏ▓ујЄуГЅС║јТхІУ»ЋжЃеС╗ХуџёТЏ▓ујЄТЌХсђѓ
тЇітЙёТхІжЄЈуџёжФўТќ»ТеАтъІУАеТўјС║єтйЊСй┐ућетЄаСйЋТеАтъІУђїСИЇТў»ТЏ┤тцЇТЮѓуџёжФўТќ»ТеАтъІТЌХ№╝їтЇітЙёТхІжЄЈСИГтГўтюеУ»»ти«[3]сђѓт»╣С║јУЙЃт░ЈуџётЇітЙёжЃетѕє№╝ѕ<1mm№╝Ѕ№╝їУ┐ЎСИфУ»»ти«Тў»тюе105жЃеС╗ХуџёжЄЈу║Д№╝їУђїт»╣С║јУЙЃтцДуџёжЃеС╗Х№╝ѕ25mm№╝Ѕ№╝їТюЅТјЦУ┐Љ108жЃеС╗ХуџёУ»»ти«сђѓтйЊУђЃУЎЉтЁиТюЅтЇітЙётЃЈти«уџёжФўТќ»ТеАтъІТЌХ№╝їNIST [2]уџёуаћуЕХУђЁтЈЉуј░С║є6nmуџёУ»»ти«№╝ѕ107жЃеС╗Х№╝ЅсђѓУ┐ЎС║ЏтЃЈти«Тў»ућ▒ТаЄтЄєжђЈжЋютњїу│╗у╗ЪСИГуџётЁХС╗ќтЁЅтГдтЁЃС╗Хуџёу╝║жЎит╝ЋУхиуџёсђѓ
СИІСИђТГЦТў»УђЃУЎЉуЅЕуљєтЁЅтГдТеАтъІсђѓтйЊуёХ№╝їуёдуѓ╣тї║тЪЪуџётѕєТъљУ«Ау«ЌТў»СИЇтЈ»УАїуџё№╝їтЏаТГцжюђУдЂУ┐ЉС╝╝сђѓт»╣С║јУ┐ЎуДЇуЅЕуљєтЁЅтГдТеАтъІ№╝їТѕЉС╗гСй┐ућеТЮЦУЄфPhoton EngineeringуџёУй»С╗ХтїЁFRED [4]сђѓ
2. FREDТеАтъІ
FREDжђџУ┐Єт░єтЁЅТ║љтЁЅТЮЪУ┐ЉС╝╝СИ║уѓ╣уйЉТа╝ТЮЦУ┐ЉС╝╝уЅЕуљєтЁЅтГдТеАтъІ№╝їтЁХСИГТ»ЈСИфуѓ╣тЈЉтЄ║жФўТќ»тѕєтИЃРђютГљТЮЪРђЮсђѓ Т»ЈСИфжФўТќ»тГљТЮЪС╗ЦABCDуЪЕжўхТќ╣Т│Ћ[5]С╝аУЙЊжђџУ┐ЄтЁЅтГду│╗у╗ЪсђѓтюеТ»ЈСИфтГљТЮЪжђџУ┐Єу│╗у╗ЪС╣Ітљј№╝їтЈатіаРђюТјбТхІтЎеРђЮСИітГљТЮЪуџёТ│бтЅЇ№╝їС╗ЦУ┐ЉС╝╝уЅЕуљєтЁЅтГдТеАтъІсђѓFREDТў»СИђСИфтЈ»УДєтїќУй»С╗ХтїЁ№╝їтЁХСИГжђЈжЋюсђЂтЈЇт░ёжЋютњїтЁЅТ║љжЃйТўЙуц║тюет«ЃС╗гуџёуЏИт»╣СйЇуй«сђѓFREDСИЇТЅДУАїтЄаСйЋтѕєТъљсђѓ
СИ║С║єТеАТІЪтЇітЙёТхІжЄЈ№╝їТѕЉС╗гждќтЁѕТЈњтЁЦТ»ЈСИфтЁЃС╗Х№╝ѕтЁЅТ║љсђЂУЂџуёджђЈжЋюсђЂТхІУ»ЋжЃеС╗ХтњїТјбТхІтЎе№╝Ѕтѕ░FREDТќЄС╗ХСИГсђѓуёХтљјУ┐йУ┐╣ТЮЦУЄфтЁЅТ║љуџётЁЅу║┐сђѓтЁЅу║┐ућ▒УЂџуёдтЁЃС╗ХУЂџуёд№╝їС╗јТхІУ»ЋжЃетѕєтЈЇт░ё№╝їтєЇућ▒УЂџуёдтЁЃС╗ХтЄєуЏ┤№╝їуёХтљјтюеТјбТхІтЎетцёУ»╗тЈќсђѓтюеТјбТхІтЎетцёуџёТюЪТюЏУЙЊтЄ║Тў»Т│бтЅЇуџёуЏИСйЇсђѓТѕЉС╗гТїЅуЁДТЅђУ┐░ТГЦжфцжђџУ┐ЄтЁ▒уёдтњїуїФую╝СйЇуй«№╝їт╣ХУјитЙЌТ»ЈСИфуѓ╣уџёуЏИСйЇтЏЙсђѓуёХтљјТѕЉС╗гСй┐ућеMatlabУ»╗тЈќуЏИСйЇТЋ░ТЇ«тњїZСйЇуй«№╝їС╗ЦуА«т«џтЁ▒уёдтњїуїФую╝уџёСйЇуй«сђѓтЇітЙёТў»СИцСИфСйЇуй«С╣ІжЌ┤уџёти«№╝їтЇітЙёУ»»ти«Тў»ТхІУ»ЋжЃеС╗ХуџёУЙЊтЁЦтЇітЙётњїУЙЊтЄ║тЇітЙёС╣ІжЌ┤уџёти«сђѓ
ТѕЉС╗гтюеТеАТІЪтЇітЙёТхІжЄЈСИГСй┐ућеС║єСИцСИфСИЇтљїуџётЁЅТ║љсђѓТѕЉС╗гТхІУ»ЋС║єтюеТЋ┤СИфтюєтйбтГћтЙёСИітЁиТюЅТЂњт«џт╝║т║дтњїуЏИСйЇуџётюєтйбтГћтЙётЁЅТЮЪ№╝їУ┐ЎТеАТІЪС║єТюђСй│т«ъжфїУБЁуй«сђѓуггС║їСИфтЁЅТ║љТў»жФўТќ»т╝║т║дтЁЅТЮЪ№╝їжђџУ┐ЄТћ╣тЈўтГљТЮЪуџёт╝║т║д№╝їСй┐тЙЌт╝║т║дуџётЈатіаТў»жФўТќ»тѕєтИЃ№╝їТЮЦтйбТѕљУ»ЦжФўТќ»тЁЅТЮЪсђѓтЁЅТ║љТ│бжЋ┐СИ║632.8nm№╝ѕТ░д-Т░ќ№╝Ѕ№╝їт╣ХУ«Йуй«СИ║уЏИт╣▓сђѓтГљТЮЪуџёТЋ░жЄЈтЈ»С╗ЦТћ╣тЈў№╝їт╣ХСИћтй▒тЊЇТхІжЄЈуџёТЌХжЌ┤тњїУЙЊтЄ║уЏИСйЇсђѓТѕЉС╗гТхІУ»ЋС║єСИЇтљїтГћтЙёт░║т»ИуџётЁЅТ║љ№╝їС╗јуЏ┤тЙёСИ║4mmуџётЙ«т╣▓ТХЅС╗фтѕ░уЏ┤тЙёСИ║150mmуџётцДт░║т║дт╣▓ТХЅС╗фсђѓ
ТѕЉС╗гТхІУ»ЋС║єСИцуДЇу▒╗тъІуџёУЂџуёдтЁЃС╗ХсђѓтЏаСИ║FREDСй┐ућет«ъжЎЁтЁЅтГдтЎеС╗ХУђїСИЇТў»У┐ЉУй┤У┐ЉС╝╝№╝їТЅђС╗ЦтЁИтъІуџёжђЈжЋютЁиТюЅтцфтцџуџёжЎётіауџёуљЃти«сђѓтЏаТГц№╝їТѕЉС╗гждќтЁѕСй┐ућеТіЏуЅЕжЮбСйюСИ║УЂџуёдтЁЃС╗Х№╝їТјЦСИІТЮЦСй┐ућетЁиТюЅтюєжћЦУАежЮб№╝ѕС╗ЦтЄЈт░ЉтЃЈти«№╝ЅуџёжђЈжЋюСйюСИ║УЂџуёдтЁЃС╗ХсђѓТѕЉС╗гжђџУ┐ЄТћ╣тЈўуёдУиЮТЮЦТхІУ»ЋСИЇтљїуџёТЋ░тђ╝тГћтЙёсђѓ
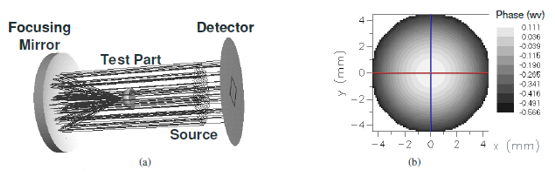
ТѕЉС╗гТхІУ»ЋС║єСИђу│╗тѕЌТхІУ»ЋжЃеС╗Х№╝їтЇітЙёС╗ј0.25mmтѕ░1mm№╝їућеС║јтЙ«т╣▓ТХЅС╗фУБЁуй«№╝їтЇітЙё25mmжЎёУ┐Љ№╝їућеС║јт«ЈУДѓт╣▓ТХЅС╗фсђѓТеАТІЪТјбТхІтЎеС╗ЦтЃЈу┤атѕњтѕє№╝їСИћтЈ»С╗ЦТћ╣тЈўсђѓСй┐ућеуџётЃЈу┤аУХітцџ№╝їТхІжЄЈжђЪт║дт░▒УХіТЁб№╝їт╣ХС╝џтй▒тЊЇуЏИСйЇУЙЊтЄ║сђѓтЏЙ4№╝ѕa№╝Ѕуц║тЄ║С║єСй┐ућеТіЏуЅЕжЮбУЂџуёдтЁЃС╗Хуџёуц║СЙІТхІжЄЈсђѓтЏЙ4№╝ѕb№╝ЅТў»тйЊжЃеС╗ХСйЇС║јуїФую╝жЎёУ┐ЉТЌХуџёТ│бтЅЇуЏИСйЇтЏЙуџётЏЙуЅЄсђѓСИ╗УдЂуџёУ»»ти«Тў»уд╗уёд№╝їУ┐ЎУАеТўјжЃеС╗Хт╣ХСИЇт«їтЁетюеуїФую╝тцёсђѓ
тЏЙ4.№╝ѕa№╝ЅFREDСИГтЇітЙёТхІжЄЈуц║ТёЈтЏЙ№╝ѕb№╝ЅТЮЦУЄфFREDТ│бтЅЇуЏИСйЇуц║СЙІ
3. у╗ЊТъю
ућ▒С║ју»Єт╣ЁжЎљтѕХ№╝їТГцтцёС╗ЁТўЙуц║С║єтЄаСИфу╗ЊТъюсђѓУ»ЦТеАтъІТўЙуц║С║єтЇітЙёсђЂуїФую╝СйЇуй«тњїтЁ▒уёдСйЇуй«тцёуџёУ»»ти«сђѓС╣Ът░▒Тў»У»┤№╝їУЙЊтЄ║тЇітЙёСИЇуГЅС║јУЙЊтЁЦтЇітЙё№╝їт╣ХСИћуїФую╝тњїтЁ▒уёдСйЇуй«С╝џТюЅтЂЈуД╗сђѓтЏЙ5ТўЙуц║тЄ║т»╣С║јТћ╣тЈўNAтњїжЃеС╗Хт░║т»ИУђїТ▓АТюЅжЎётіауџётЃЈти«уџётЙ«т╣▓ТХЅС╗фуџёТеАтъІуџёу╗ЊТъюсђѓтдѓтЏЙ5№╝ѕa№╝ЅТЅђуц║№╝їУ»»ти«жџЈуЮђуџёNAуЏ«ТаЄтЈўт░ЈУђїтбътіа№╝їтдѓжбёТюЪуџёжѓБТаи№╝їтЏаСИ║уёдуѓ╣УЙЃтцДсђѓТГцтцќ№╝їт»╣С║јУЙЃтцДуџёжЃеС╗Х№╝їУ»»ти«УЙЃт░Ј№╝їтдѓтЏЙ5№╝ѕb№╝ЅТЅђуц║сђѓт»╣С║јтюеf/3.2тњї25mmтЇітЙёУЙЊтЁЦжЃеС╗Хуџёт«ЈУДѓт░║т║дт╣▓ТХЅС╗ф№╝їУ»»ти«СИ║133nm№╝ї106СИГ5СИфжЃеС╗ХсђѓУ┐ЎСИфУ»»ти«жЄЈтЈ»С╗Цт╝ђтДІУДБжЄітюеNISTуџёт«ъжфїСИГТЅђТўЙуц║уџёти«т╝ѓ[2]сђѓУ┐ЎС║ЏУ»»ти«СИЇтГўтюеС╗╗СйЋтЃЈти«сђѓтдѓТъют░єтЁИтъІуџётЃЈти«жЄЈТи╗тіатѕ░ТеАтъІСИГ№╝їтѕЎжбёТюЪУ»»ти«т░єтбътіа№╝їУ┐ЎТў»ТѕЉС╗гуџётиЦСйюуџёСИІСИђуј»Уіѓсђѓ
тЏЙ5.Сй┐ућетЄаСйЋТеАтъІУђїСИЇТў»ТЏ┤тіатцЇТЮѓуџёFREDТеАтъІуџёУ»»ти«№╝їТЋ░ТЇ«ТЮЦТ║љС║јтЙ«т╣▓ТХЅС╗фУБЁуй«сђѓ
|
|
|
|
|
|
|
|
|
ТџѓТЌатЏътцЇ№╝їу▓ЙтйЕС╗јСйат╝ђтДІ№╝Ђ