уц║СЙІ.0080(1.0)
тЁ│жћ«У»Ї№╝џтЁЅу║┐У┐йУ┐╣№╝їжЋютц┤№╝їС╝ўтїќ№╝їТЏ▓ујЄтЇітЙё№╝їУ«ЙУ«А
1.ТЈЈУ┐░
Рќи тюеУ»Цуц║СЙІСИГ№╝їТѕЉС╗гС╗Іу╗ЇС║єтдѓСйЋтѕЕућеVirtualLabУй»С╗ХСИГуџётЁЅу║┐У┐йУ┐╣т╝ЋУ┐ЏУАїтЈѓТЋ░С╝ўтїќсђѓ
Рќи тюеТГцуц║СЙІСИГ№╝їт»╣СИђСИфуљЃжЮбжђЈжЋюУ┐ЏУАїС╝ўтїќ№╝їСй┐тЁХтюежђЈжЋютљјТїЄт«џуџёУиЮуд╗СИіућЪТѕљУЂџуёдтЁЅТќЉсђѓ
Рќи уљЃжЮбжЋюуџётЁЅтГдуЋїжЮбуџёТЏ▓ујЄтЇітЙёУбФУ«ЙУ«АСИ║УЄфућ▒тЈўжЄЈсђѓ
2.у│╗у╗ЪтЁЅУи»тЏЙтЈіу│╗у╗ЪжЁЇуй«
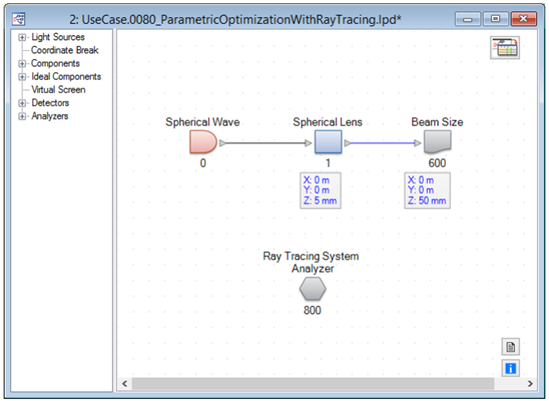
ТќЄС╗ХтљЇ№╝џUseCase.0080_ParametricOptimizationWithRayTracing.lpd
Рќи У»ЦтЁЅтГду│╗у╗Ъућ▒уљЃжЮбТ│буЁДт░ёСИђСИфуљЃжЮбжђЈжЋюу╗ёТѕљсђѓ
Рќи жђџУ┐ЄУ«ЙУ«А№╝їСй┐жђЈжЋюуџёуёдуѓ╣СйЇС║јжђЈжЋютљј50mmуџёСйЇуй«сђѓ
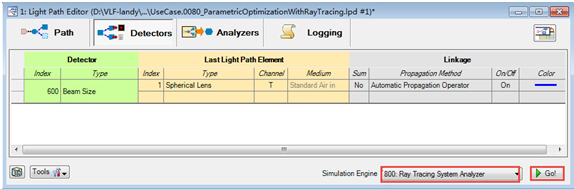
Рќи тюеуЏ«ТаЄт╣│жЮбтцё№╝їтѕЕућетЁЅТЮЪт░║т»ИТјбТхІтЎеУ«Ау«ЌтЁЅТќЉуџётцДт░Јсђѓ
Рќи тЁЅТЮЪт░║т»ИТјбТхІтЎеТЈљСЙЏС║єтЄаСИфжђЅжА╣№╝їтїЁТІгтѕЕућетЁЅу║┐У┐йУ┐╣т╝ЋТЊјУ»ёС╝░тЁЅТќЉуџётцДт░Јсђѓ
Рќи ућеТѕитЈ»С╗ЦжђЅТІЕТхІжЄЈТќ╣Т│Ћ№╝ѕRMSТѕќт│░тђ╝№╝ЅУ┐ЏУАїУ«Ау«Ќ№╝їС╣ЪтЈ»С╗ЦжЎётіатЈѓТЋ░сђѓ
тЁЅТЮЪт░║т»ИТјбТхІтЎетЈѓТЋ░уфЌтЈБ
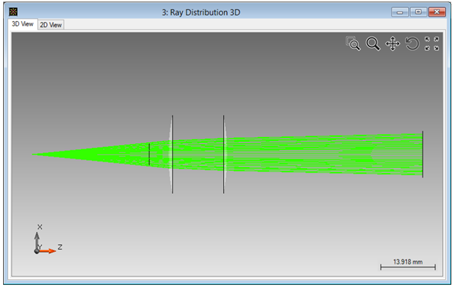
3.тѕЮтДІу│╗у╗ЪуџётЁЅу║┐У┐йУ┐╣у╗ЊТъю№╝ѕ3D№╝Ѕ
жђЅТІЕтЁЅу║┐У┐йУ┐╣у│╗у╗ЪтѕєТъљтЎе№╝їуѓ╣тЄ╗Go№╝Ђ
тѕЮтДІу│╗у╗ЪтЁЅу║┐У┐йУ┐╣у╗ЊТъю
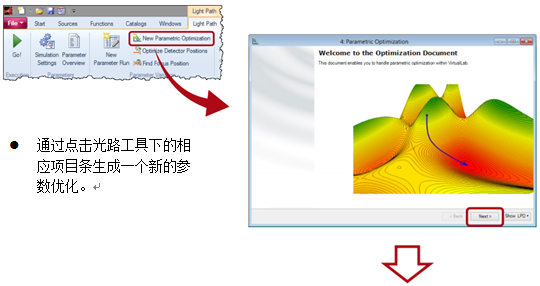
4.тЈѓТЋ░С╝ўтїќуџёућЪТѕљ
5.У«Йуй«тЈѓТЋ░С╝ўтїќ
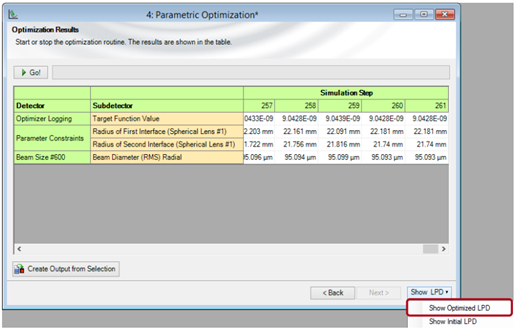
6.тЈѓТЋ░С╝ўтїќу╗ЊТъю
С╝ўтїќу╗ЊТъюжАхжЮб№╝їжђЅТІЕРђюТўЙуц║С╝ўтїќтљјуџётЁЅУи»тЏЙРђЮ№╝ѕРђЮShow Optimized LPDРђЮ№╝ЅтЈ»С╗ЦУјитЙЌС╝ўтїќтљјуџётЁЅУи»тЏЙ
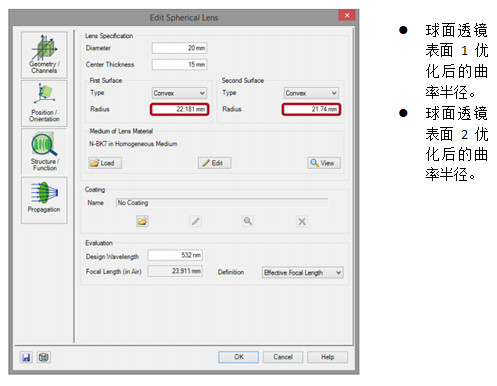
7.С╝ўтїќтљју│╗у╗ЪуџёжђЈжЋютЈѓТЋ░
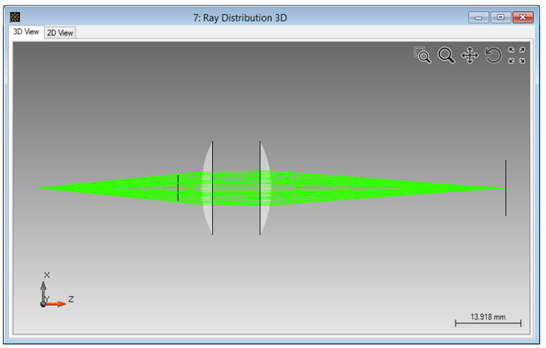
8.С╝ўтїќтљју│╗у╗ЪуџётЁЅу║┐У┐йУ┐╣у╗ЊТъю№╝ѕ3D№╝Ѕ
жђџУ┐ЄСй┐ућетЁЅу║┐У┐йУ┐╣у│╗у╗ЪтЎе№╝ѕRay Tracing System Analyzer№╝ЅУјитЙЌтЁЅу║┐У┐йУ┐╣СИЅу╗┤у╗ЊТъю
9.Тђ╗у╗Њ
Рќи VirtualLab FusionтЈ»С╗ЦућеТЮЦт«їТѕљтЁЅтГду│╗у╗ЪуџётЁЅу║┐У┐йУ┐╣С╗┐уюЪсђѓ
Рќи VirtualLabТЈљСЙЏС║єСИЅу╗┤тЁЅу║┐У┐йУ┐╣тњїС║їу╗┤тЁЅу║┐У┐йУ┐╣№╝ѕуѓ╣тѕЌтЏЙућЪТѕљтЈіУЄфт«џС╣ЅУ»ёС╗итЄйТЋ░№╝Ѕсђѓ
Рќи тюеVirtualLabуџётЈѓТЋ░С╝ўтїќУ┐ЄуеІСИГТЅђТюЅуџёт╝ЋТЊјТеАтЮЌжЃйтЈ»ућесђѓ
Рќи жђџУ┐ЄСИђСИфтЈѓТЋ░уџёС╝ўтїќтЈ»С╗ЦтѕЕућетЁЅу║┐У┐йУ┐╣т«їТѕљт»╣тЁЅтГду│╗у╗ЪуџёС╝ўтїќсђѓ
Рќи тЈ»С╗ЦСй┐ућеСИЇтљїуџёС╝ўтїќу«ЌТ│Ћсђѓ
|
|
|
|
|
|
|
|
|
ТџѓТЌатЏътцЇ№╝їу▓ЙтйЕС╗јСйат╝ђтДІ№╝Ђ