дә”з»„е…ғиҝһз»ӯеҸҳз„Ұзі»з»ҹе®һйҷ…дёҠжҳҜеңЁдёүз»„е…ғзі»з»ҹжҳҜеҹәзЎҖдёҠеҸ‘еұ•иө·жқҘзҡ„дёӨдёӘдёүз»„е…ғиҝһз»ӯеҸҳз„Ұзі»з»ҹзҡ„еҸ еҠ гҖӮеүҚеҗҺдёӨдёӘдёүз»„е…ғеҸӮж•°еҲҶй…ҚдёҖж ·пјҢдёӨдёӘеҸҳз„Ұз»„е’ҢиҝһдёӘиЎҘеҒҝз»„еҲҶеҲ«еӣәиҒ”еңЁдёҖиө·пјҢжҢүз»ҹдёҖ规еҫӢиҝҗеҠЁгҖӮзі»з»ҹз»“жһ„д№ҹжҜ”иҫғз®ҖеҚ•гҖӮз”ұдәҺжҳҜдёӨдёӘзі»з»ҹзҡ„еҸ еҠ пјҢеӣ жӯӨе…¶еҸҳз„ҰиҢғеӣҙеҸҜд»ҘжҢүе№іж–№е…ізі»жү©еӨ§иҖҢдёҚеҪұе“ҚиЎҘеҒҝжӣІзәҝзҡ„иҝҮеәҰејҜжӣІгҖӮдҪҶжҜ•з«ҹеӨҚжқӮдәҶеҸҳз„Ұз»„з»“жһ„пјҢеҜ№зі»з»ҹеғҸе·®е№іиЎЎжңүдёҖе®ҡзј“е’ҢдҪңз”ЁгҖӮжң¬иҪҜ件еҢ…ж №жҚ®иҝҷдәӣи®ҫи®Ўж–№жі•иҝӣиЎҢе…ЁйқўеҲқе§Ӣз»“жһ„и®ҫи®ЎгҖӮд»Һзі»з»ҹеӨ–еҪўе°әеҜёиҮӘеҠЁи®Ўз®—еҲ°еҲқзә§еғҸе·®зі»ж•°зҡ„иҮӘеҠЁе№іиЎЎпјҢз”ҡиҮіеҸҜд»Ҙд»ҺиҮӘеҠЁйҖүзҺ»з’ғеҲ°и§ЈеҮәеҗ„з»„еҲҶиЎЁйқўеҚҠеҫ„гҖӮ
еӣҫ1.еҸҳз„Ұзі»з»ҹй«ҳж–Ҝи®Ўз®—зӘ—дҪ“
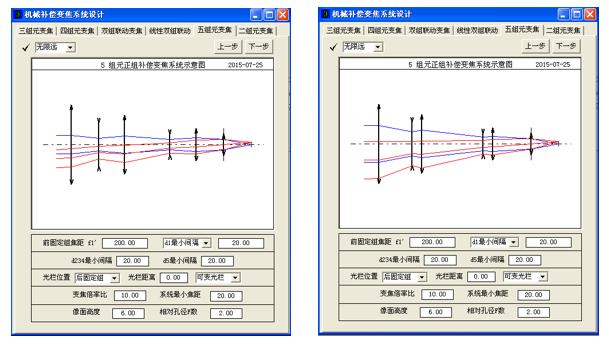
в‘ еӨ–еҪўе°әеҜёиҮӘеҠЁи®Ўз®—
еңЁйҖүжӢ©вҖңи®ҫи®ЎвҖқиҸңеҚ•дёӯзҡ„вҖңеҸҳз„Ұзі»з»ҹй«ҳж–Ҝи®Ўз®—вҖқеҗҺпјҢдјҡеҮәзҺ°дёҖдёӘеҰӮеӣҫ1зҡ„е°ҸзӘ—дҪ“гҖӮзӘ—дҪ“дёӯеӨ®жҳҫзӨәдәҶдә”з»„е…ғиҝһз»ӯеҸҳз„Ұзі»з»ҹзҡ„з»“жһ„зӨәж„ҸеӣҫпјҢдёӢйқўиЎЁж јз»ҷеҮәзі»з»ҹзҡ„зү№еҫҒж•°жҚ®еҲ—иЎЁпјҢе·ҰдёҠж–№жңүдёӢжӢүејҸж–Үжң¬жЎҶйҖүжӢ©и®ҫи®Ўи®Ўз®—д»ҘеүҚеӣәе®ҡз»„иҝҳжҳҜд»ҘеҗҺеӣәе®ҡз»„дёәеҹәзЎҖгҖӮж №жҚ®еүҚеӣәе®ҡз»„жұӮи§ЈжҳҜе·ІзҹҘеүҚеӣәе®ҡз»„з„Ұи·қеҖјеҮәеҸ‘и®Ўз®—зі»з»ҹеӨ–еҪўе°әеҜёж•°жҚ®пјҢеҸҚд№ӢжҳҜд»ҺеҗҺеӣәе®ҡз»„з„Ұи·қеҖјеҮәеҸ‘и®Ўз®—зі»з»ҹеӨ–еҪўе°әеҜёж•°жҚ®гҖӮжҢүиЎЁдёӯеҶ…е®№еЎ«еҶҷе®ҢжҜ•пјҢдә”з»„е…ғиҝһз»ӯеҸҳз„Ұзі»з»ҹзҡ„еӨ–еҪўе°әеҜёи®Ўз®—е·ҘдҪңз«ӢеҚіиҮӘеҠЁе®ҢжҲҗгҖӮжӯӨж—¶еҰӮжһң
йҖүжӢ©е·Ҙе…·жқЎдёҠвҖңеӣҫж–ҮвҖқжҢүй’®е°ұдјҡжҳҫзӨәзі»з»ҹеӨ–еҪўе°әеҜёи®Ўз®—з»“жһ„ж•°жҚ®пјҢеҰӮеӣҫ2гҖӮ
еӣҫ2.еӨ–еҪўе°әеҜёи®Ўз®—ж•°жҚ®
еҰӮжһңйҖүжӢ©е·Ҙе…·жқЎдёҠвҖңеҠЁз”»вҖқжҢүй’®иҝҳеҸҜд»ҘжҳҫзӨәзі»з»ҹеҸҳз„ҰиҝҗеҠЁзҡ„еҠЁз”»ж•ҲжһңгҖӮеҰӮеӣҫ3гҖӮ
еӣҫ3.еҸҳз„Ұзі»з»ҹеҸҳз„ҰиҝҗеҠЁеҠЁз”»
еӣҫ4.еЎ«еҶҷеҲқзә§еғҸе·®зі»ж•°
в‘Ў еҲқзә§еғҸе·®зі»ж•°иҮӘеҠЁе№іиЎЎ
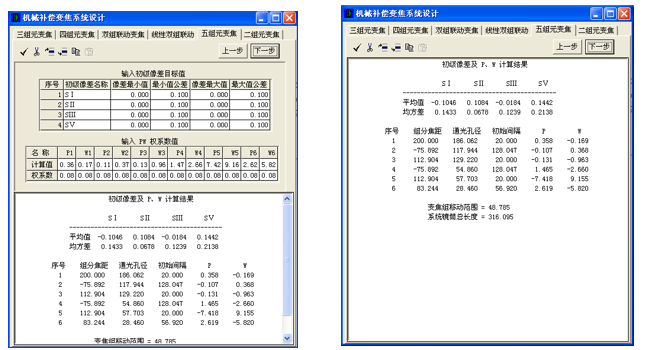
е®ҢжҲҗеӨ–еҪўе°әеҜёи®Ўз®—еҗҺе°ұеҸҜд»ҘжҺҘзқҖиҝӣиЎҢзі»з»ҹеҲқзә§еғҸе·®зҡ„е№іиЎЎдјҳеҢ–и®ҫи®ЎгҖӮжӯӨж—¶жҢүвҖңдёӢдёҖжӯҘвҖқе‘Ҫд»Өй’®пјҢзӘ—дҪ“з«ӢеҚіеҮәзҺ°дёӢдёҖдёӘз”»йқўеҰӮеӣҫ5гҖӮе…¶дёӯеҲ—еҮәдёӨдёӘиЎЁж јпјҢдёҖдёӘжҳҜиҰҒжұӮиҫ“е…Ҙеҗ„еҲқзә§еғҸе·®зі»ж•°зҡ„зӣ®ж ҮеҖјпјҢеҸҰдёҖдёӘиҰҒжұӮиҫ“е…Ҙзі»з»ҹеҗ„з»„е…ғзҡ„PWеҸӮж•°зҡ„еҲқе§ӢеҸӮиҖғеҖјеҸҠе…¶жқғзі»ж•°гҖӮ
еҸӮеҠ дјҳеҢ–и®ҫи®Ўзҡ„еҲқзә§еғҸе·®йЎ№зӣ®еҸҜйҖүпјҢйҖүжӢ©ж—¶дҪҝз”Ёе·Ҙе…·жқЎдёҠжҸ’е…Ҙе’ҢеҲ йҷӨжҢүй’®иҝӣиЎҢж“ҚдҪңгҖӮд»ҘдёҠж•°жҚ®иҫ“е…Ҙе®ҢжҜ•пјҢжҢүеҠЁе·Ҙе…·жқЎдёҠзЎ®е®ҡжҢүй’®пјҢи®Ўз®—з«ӢеҚіе®ҢжҲҗпјҢ并жҳҫзӨәеңЁдёӢйқўж–Үжң¬жЎҶеҶ…пјҢеҰӮеӣҫ5гҖӮеҲ©з”Ёе·Ҙе…·жқЎдёҠвҖңеӣҫж–ҮвҖқиҸңеҚ•йҡҸж—¶еҸҜд»ҘеҚ•зӢ¬жҳҫзӨәPWиҮӘеҠЁдјҳеҢ–з»“жһңпјҢеҫ—еҮәзі»з»ҹе®һйҷ…еғҸе·®е№іиЎЎж•°жҚ®пјҢжңҖз»Ҳе®ҢжҲҗдә”з»„е…ғиҝһз»ӯеҸҳз„Ұзі»з»ҹзҡ„й«ҳж–Ҝе…үеӯҰи®ҫи®ЎгҖӮ
еӣҫ5.PWиҮӘеҠЁдјҳеҢ–з»“жһң
в‘ў жңәжў°иЎҘеҒҝејҸиҝһз»ӯеҸҳз„Ұе…үеӯҰзі»з»ҹзҡ„еҮёиҪ®жӣІзәҝ
жүҖи°“жңәжў°иЎҘеҒҝејҸиҝһз»ӯеҸҳз„Ұе…үеӯҰзі»з»ҹе°ұжҳҜеҲ©з”ЁдёӨдёӘжҙ»еҠЁз»„еҲҶпјҲдҝ—з§°еҸҳз„Ұз»„е’ҢиЎҘеҒҝз»„пјүеҗ„иҮӘд»ҘдёҚеҗҢеҮҪж•°зҡ„иҝҗеҠЁи§„еҫӢжІҝиҪҙеҗ‘移еҠЁж”№еҸҳе…үеӯҰзі»з»ҹеҗ„з»„еҲҶй—ҙиЎЁйқўй—ҙйҡ”и·қзҰ»еңЁж”№еҸҳзі»з»ҹз„Ұи·қзҡ„еҗҢж—¶дҝқжҢҒеғҸйқўдҪҚзҪ®зЁіе®ҡдёҚеҸҳгҖӮеңЁй•ңеӨҙжңәжў°з»“жһ„ж—¶еҫҖеҫҖйҮҮз”ЁеҮёиҪ®з»“жһ„еҪўејҸе®ҢжҲҗжҙ»еҠЁз»„еҲҶжҢүиҰҒжұӮиҝҗеҠЁгҖӮеңЁи®ҫи®ЎеҮёиҪ®жңәжһ„ж—¶еҝ…йЎ»з”ұе…үеӯҰи®ҫи®Ўз»ҷеҮәеҮёиҪ®иҝҗеҠЁжӣІзәҝгҖӮеҮёиҪ®жӣІзәҝжҳҜеңЁи®ҫи®Ўжңәжў°иЎҘеҒҝејҸиҝһз»ӯеҸҳз„Ұе…үеӯҰзі»з»ҹж—¶пјҢдёәдҝқиҜҒзі»з»ҹеғҸйқўдҪҚзҪ®зЁіе®ҡпјҢз”Ёй«ҳж–Ҝе…үеӯҰзҗҶи®әи®Ўз®—еҸҳз„Ұз»„е’ҢиЎҘеҒҝз»„зҡ„иҝҗеҠЁжӣІзәҝгҖӮдёәжӯӨпјҢеңЁжң¬и®ҫи®Ўж—¶е°ұиҮӘеҠЁи®Ўз®—еҮәдәҶзі»з»ҹеҮёиҪ®жӣІзәҝеқҗж ҮеҖје№¶з»ҳеҮәеҮёиҪ®жӣІзәҝеҰӮеӣҫ6пјҢйҖҡиҝҮе·Ҙе…·жқЎдёҠвҖңеӣҫж–ҮвҖқиҸңеҚ•йҡҸж—¶еҸҜд»ҘжҳҫзӨәеҮёиҪ®жӣІзәҝзҡ„еҸӮж•°еқҗж ҮеҖјеҰӮеӣҫ7жүҖзӨәгҖӮ
еӣҫ6.еҸҳз„Ұе…үеӯҰзі»з»ҹеҮёиҪ®жӣІзәҝеӣҫ
еӣҫ7.еҸҳз„Ұе…үеӯҰзі»з»ҹеҮёиҪ®жӣІзәҝеҸӮж•°иЎЁ
в‘Ј дә”з»„е…ғиҝһз»ӯеҸҳз„Ұзі»з»ҹеҗ„з»„еҲҶеҜ№еғҸйқўеҒҸ移еҸҠиЎҘеҒҝзҡ„е…ізі»
дә”з»„е…ғиҝһз»ӯеҸҳз„Ұзі»з»ҹеҗ„з»„еҲҶеҜ№еғҸйқўеҒҸ移еҸҠиЎҘеҒҝзҡ„е…ізі»еҰӮеӣҫ8жүҖзӨәгҖӮ
еӣҫ8.еҗ„з»„еҲҶеҜ№иұЎйқўеҒҸ移зҡ„иҙЎзҢ®зӨәж„Ҹеӣҫ
|
|
|
|
|
|
|
|
|
жҡӮж— еӣһеӨҚпјҢзІҫеҪ©д»ҺдҪ ејҖе§ӢпјҒ