ТЉўУдЂ
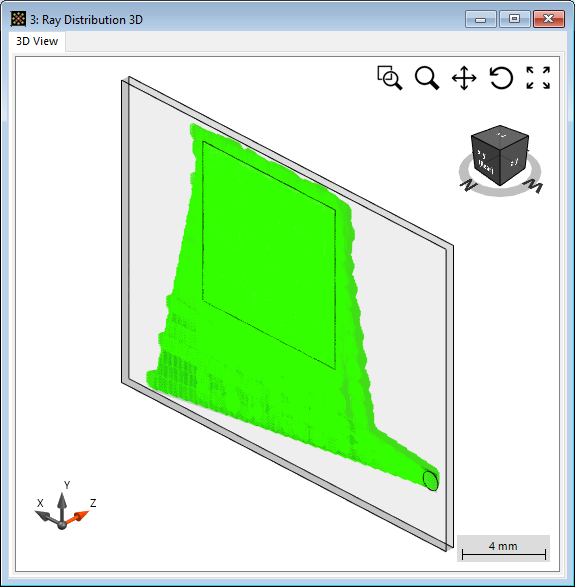
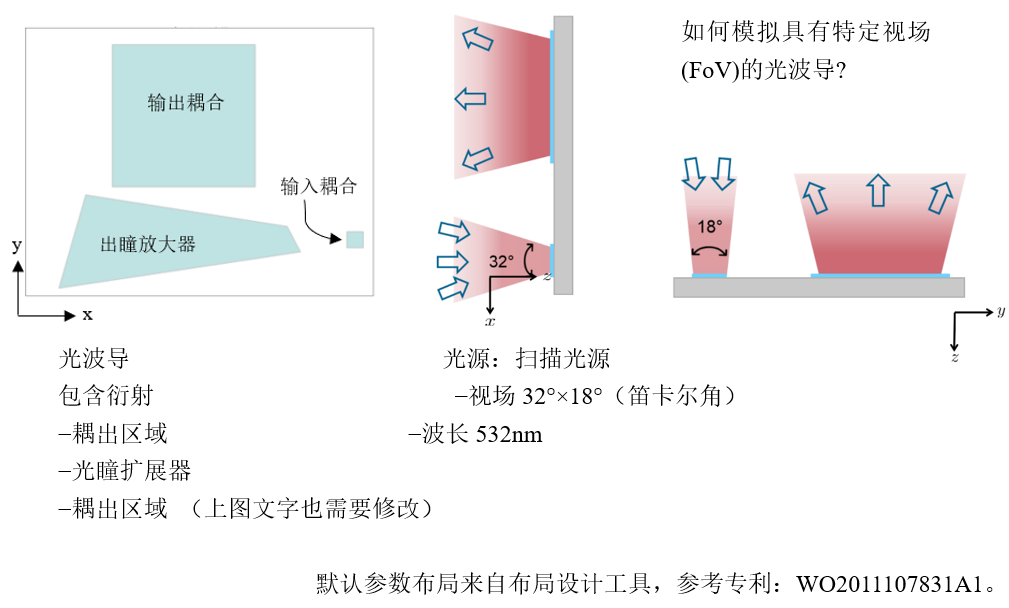
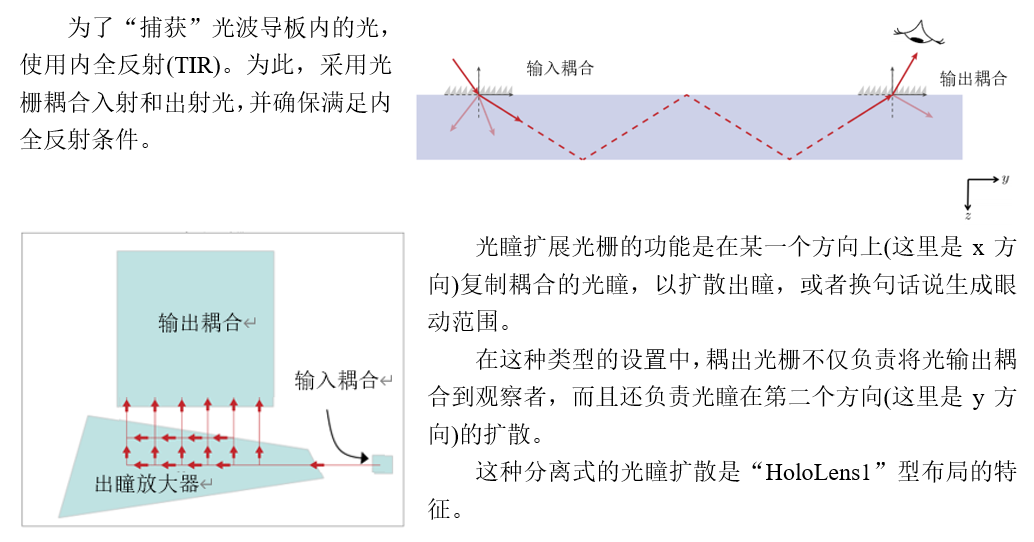
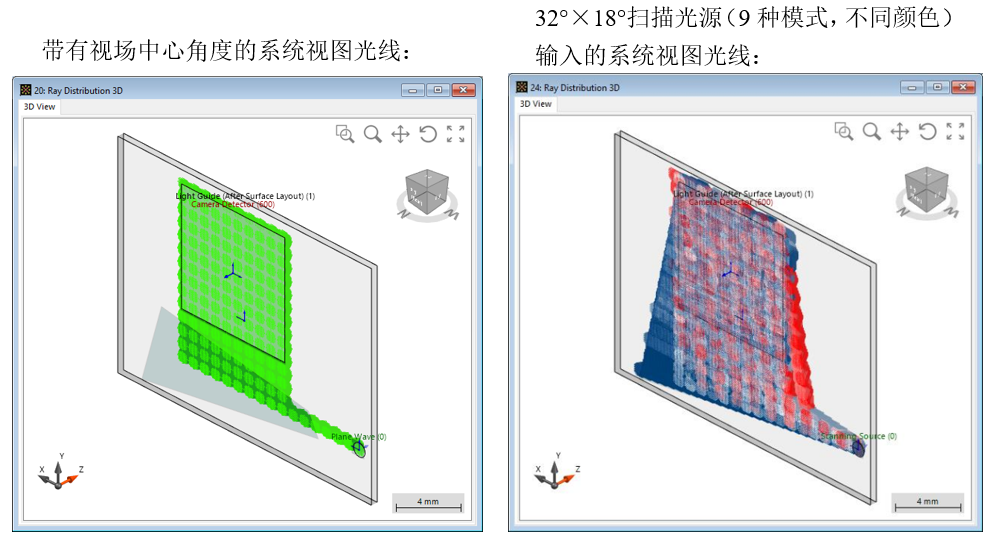
уЏ«тЅЇ№╝їтцДтцџТЋ░тѕЏТќ░уџётбът╝║тњїТиитљѕуј░т«ъУ«ЙтцЄжЃйТў»тЪ║С║јтЁЅТ│бт»╝жЁЇуй«№╝їт╣Ху╗ЊтљѕтЙ«УДѓу╗ЊТъёТЮЦУђдтљѕтЁЅуџёУЙЊтЁЦтњїУЙЊтЄ║сђѓVirtualLab FusionТіђТю»УЃйтцЪжђџУ┐Єт║ћућеТѕЉС╗гуІгуЅ╣уџёуЅЕуљєтЁЅтГдТќ╣Т│Ћт»╣У┐ЎС║ЏтЎеС╗ХУ┐ЏУАїУ»ду╗єуџёт╗║ТеА№╝їтЁХСИГтїЁТІгТЅђТюЅТёЪтЁ┤УХБуџётй▒тЊЇтЏау┤а№╝ѕтдѓуЏИт╣▓ТђДсђЂтЂЈТї»тњїУАЇт░ё№╝ЅсђѓТѕЉС╗гжђџУ┐Єт╗║уФІСИђСИфу«ђтЇЋуџёРђюHoloLens1РђЮтъІ№╝ѕ1D-1DтЁЅуъ│ТЅЕт▒ЋтЎе№╝ЅтИЃт▒ђТеАтъІТЮЦТ╝ћуц║У┐ЎуДЇУЃйтіЏ№╝їУ»ЦУ«ЙтцЄУЃйтцЪтюе32┬░├Ќ18┬░уџёУДєтю║СИІт╝Ћт»╝тЁЅС╝аУЙЊсђѓ
т╗║ТеАС╗╗тіА
тЁЅТ│бт»╝уџётиЦСйютјЪуљє
тИЃт▒ђУ«ЙУ«АтиЦтЁи
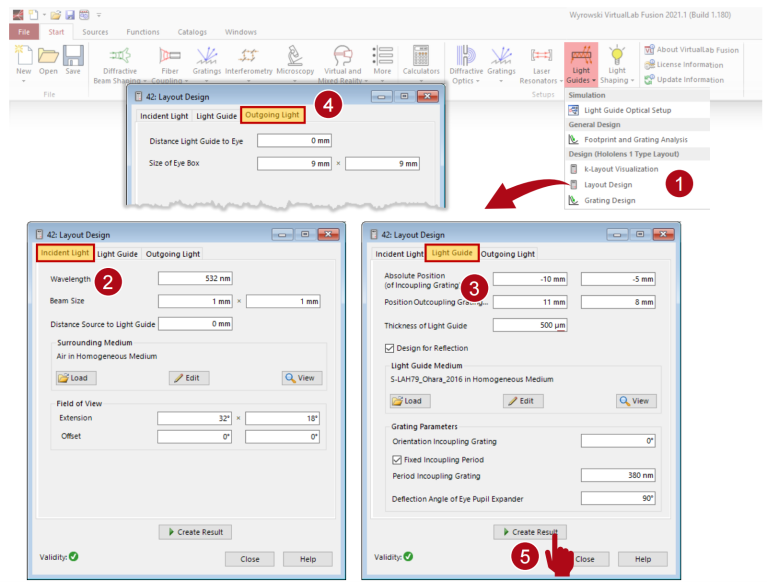
СИ║С║єУ«Йуй«У┐ЎуДЇтЁЅТ│бт»╝уџёТефтљЉтИЃт▒ђ№╝їтЈ»С╗ЦСй┐ућеVirtualLabуџётИЃт▒ђУ«ЙУ«АтиЦтЁи№╝ѕС╗ЁтюетЁЅТ│бт»╝тиЦтЁиу«▒СИГтЈ»уће№╝Ѕсђѓ
ТГцСй┐ућеТАѕСЙІуџётЈѓТЋ░т»╣т║ћС║јж╗ўУ«цжЁЇуй«сђѓ
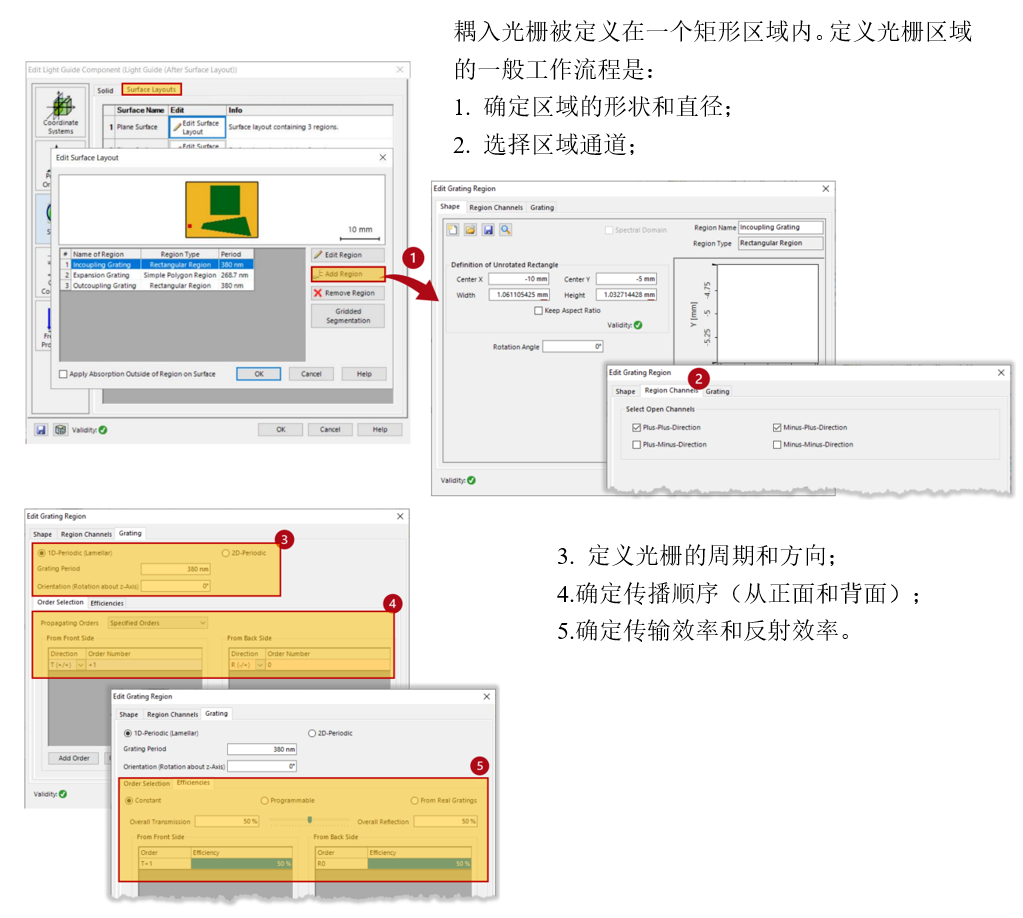
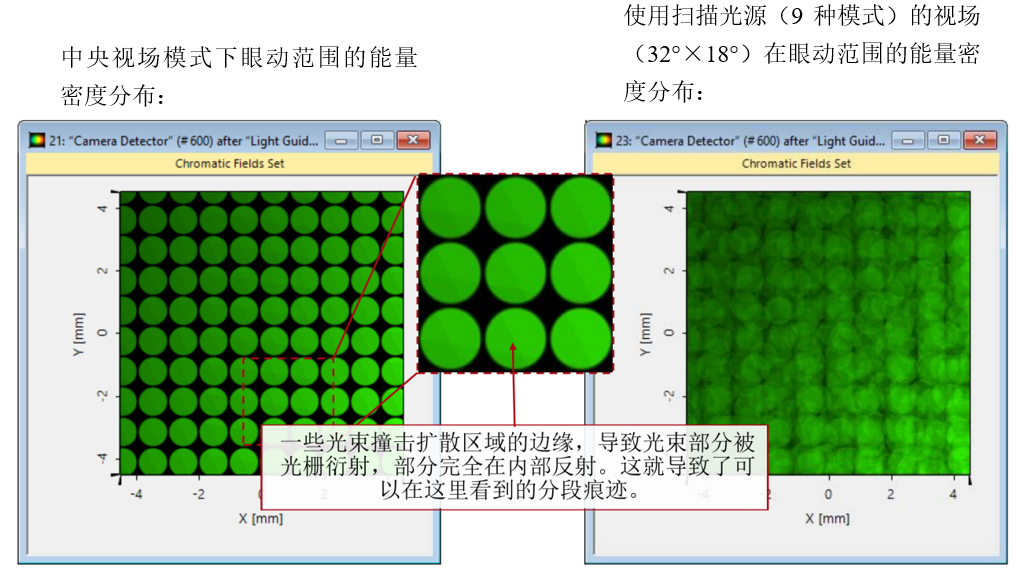
У»ЦтиЦтЁиТа╣ТЇ«у╗Ўт«џуџёУДёТа╝уџётЁЦт░ётЁЅтњїую╝тіеУїЃтЏ┤ТЈљСЙЏС║єСИђСИфтЁЅТ│бт»╝уџётЁЅтГдтЈѓТЋ░У«Йуй«сђѓуЅ╣тѕФТ│еТёЈуџёТў»№╝їтЁЅТаЁтї║тЪЪуџёТефтљЉСйЇуй«тњїт╗ХС╝ИС╗ЦтЈітЁЅТаЁтЉеТюЪжЃйТў»УЄфтіеУ«Йуй«уџёсђѓ
т«џС╣ЅтЈѓТЋ░тљј№╝їтЇЋтЄ╗РђютѕЏт╗║у╗ЊТъюРђЮТїЅжњ«№╝їуёХтљјС╝џтѕЏт╗║тЄ║тЁЅтГдтЈѓТЋ░У«Йуй«тњїуЏИт║ћуџёkтЪЪтИЃт▒ђтЏЙсђѓ
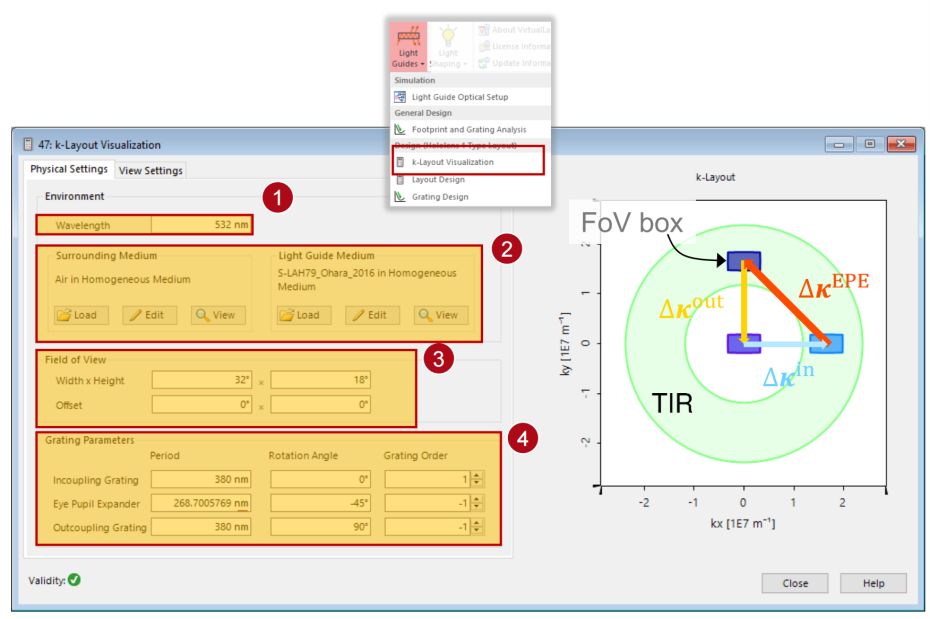
ТЪЦуюІkтЪЪУ«ЙУ«А
kтЪЪУ«ЙУ«АтЏЙтЈ»С╗ЦСИјтЁЅт»╝У«Йуй«СИђУхиСйюСИ║тИЃт▒ђУ«ЙУ«АтиЦтЁиуџётЅ»С║ДтЊЂтѕЏт╗║№╝їС╣ЪтЈ»С╗ЦжђџУ┐ЄУЈютЇЋСИГуџёТЮАуЏ«уІгуФІућЪТѕљсђѓ
тЈ»С╗ЦУ«Йуй«С╗ЦСИІтЈѓТЋ░№╝џ
Т│бжЋ┐№╝Џ
уј»тбЃтњїт╣│ТЮ┐уџёТЮљТќЎ№╝Џ
УДєтю║УДњУїЃтЏ┤№╝Џ
тЁЅТаЁтЉеТюЪтњїТќ╣тљЉсђѓ
у╗ЊТъютЏЙтїЁтљФС╗ЦСИІС┐АТЂ»(тюеkтЪЪСИГ)№╝џ
ТЈЈУ┐░ТЮљТќЎтєЁжЃеС╝аТњГТЮАС╗Хуџётює(тЈ»ућеТќ╣тљЉтњїkтђ╝)сђѓ
тЁЦт░ётЁЅтњїтюеТЪљС║ЏтЁЅТаЁтї║тЪЪтљјУАЇт░ётЁЅуџёт╗ХС╝ИсђЂтйбуіХтњїСйЇуй«сђѓ
ућ▒тЁЅТаЁт╝ЋтЁЦуџёУДєтю║СйЇуД╗уџёУ»┤Тўјсђѓ
С╗╗СйЋтЈѓТЋ░уџёУ░ЃТЋ┤жЃйС╝џуЏИт║ћтю░Тћ╣тЈўтЏЙтЃЈсђѓ
тЁЅТ│бт»╝УАежЮбУ«ЙУ«А
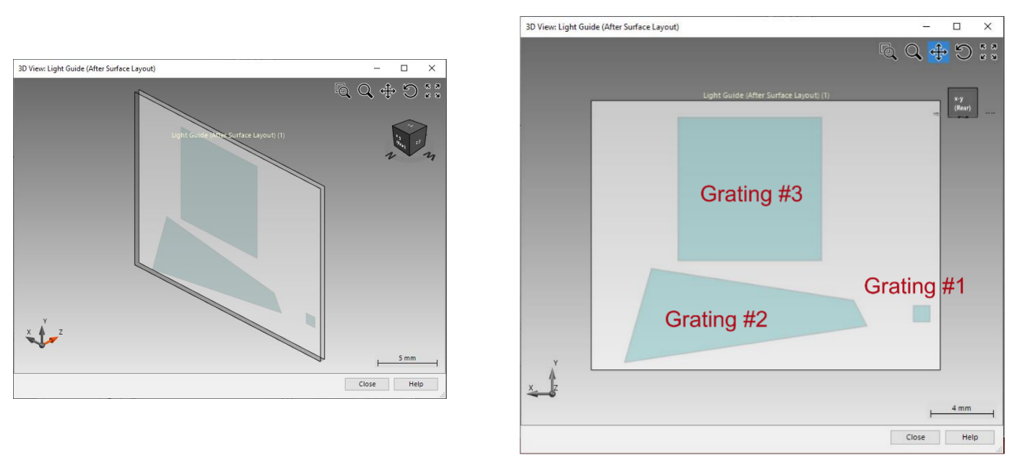
тЄаСйЋУ«ЙУ«Ат▒Ћуц║С║єуггСИђт╣│жЮбУАежЮбСИіуџё3СИфтЁЅТаЁ№╝џ
тЁЅТаЁ#1№╝џУђдтЁЦтЁЅТаЁ
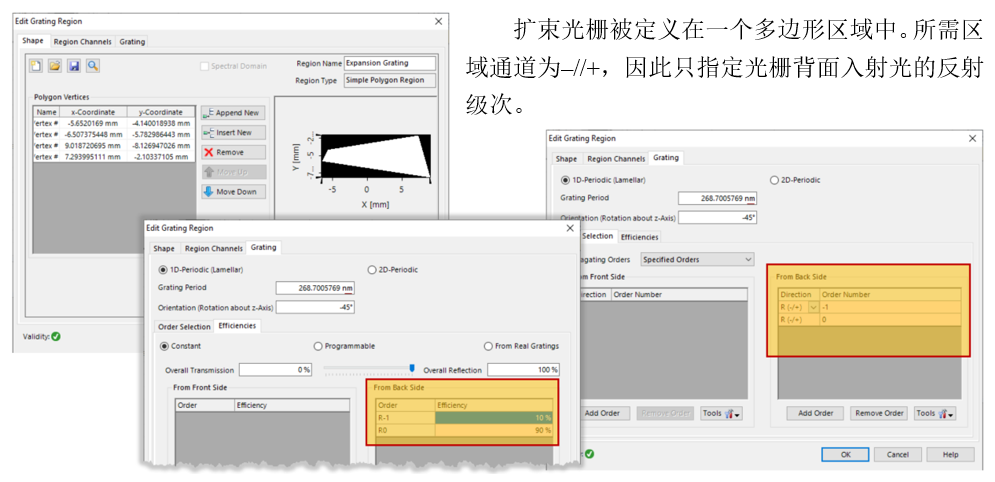
тЁЅТаЁ#2№╝џТЅЕТЮЪтЁЅТаЁ
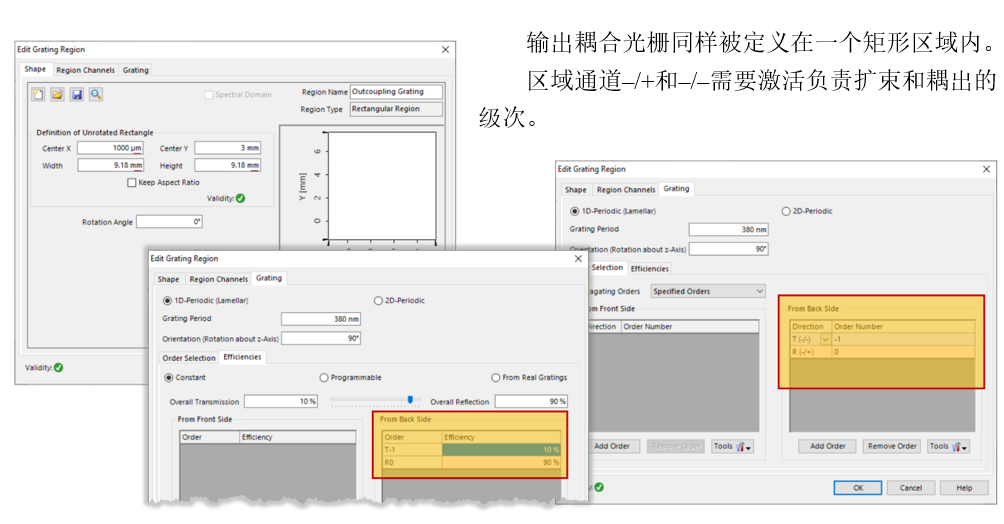
тЁЅТаЁ#3№╝џУђдтЄ║тЁЅТаЁ
тЁЅТаЁ#1№╝џУђдтЁЦтЁЅТаЁ
тЁЅТаЁ#2№╝џу«ђтЇЋтцџУЙ╣тйбтї║тЪЪСИГуџёТЅЕТЮЪтЁЅТаЁ
тЁЅТаЁ#3№╝џУђдтЄ║тЁЅТаЁ
у╗ЊТъю№╝џСИЅу╗┤у│╗у╗ЪСИГуџётЁЅу║┐У┐йУ┐╣
у╗ЊТъю№╝џтю║У┐йУ┐╣№╝ѕтЁетйЕУЅ▓УДєтЏЙ№╝Ѕ
у╗ЊТъю№╝џтю║У┐йУ┐╣№╝ѕС╝фтйЕУЅ▓УДєтЏЙ№╝Ѕ
ТефтљЉтЮЄтїђТђДУ»ёС╗и
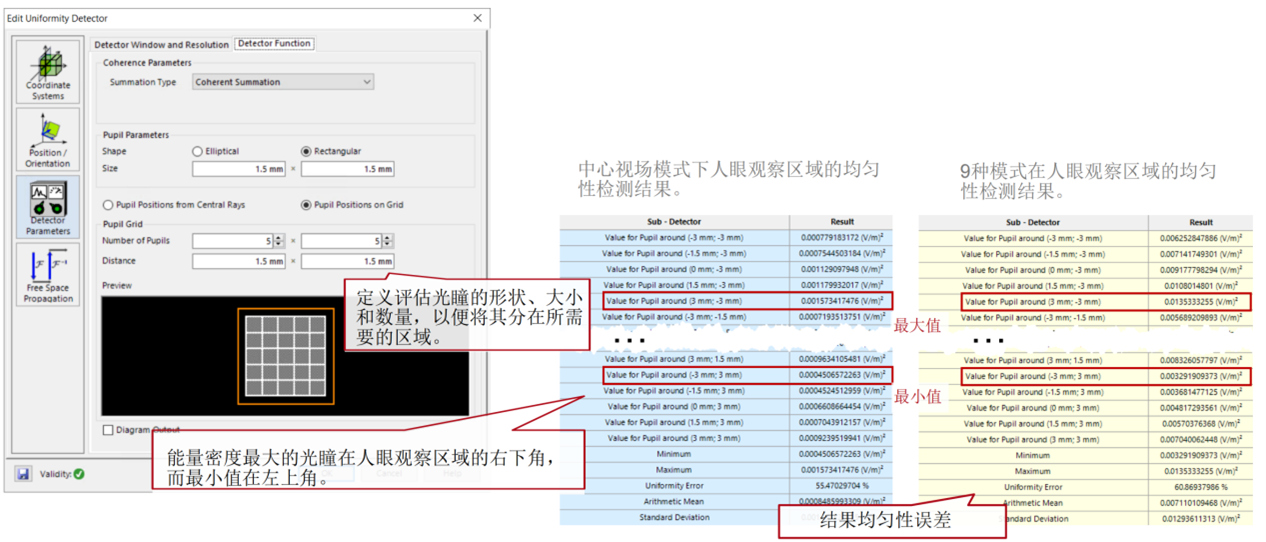
СИ║С║єУ»ёС╝░ую╝тіеУїЃтЏ┤тєЁуџёТефтљЉтЮЄтїђТђД№╝їТЈљСЙЏС║єтЮЄтїђТђДТБђТхІтЎе№╝їт«ЃтЈ»С╗ЦтюетЁЃС╗ХТаЉСИГТЅЙтѕ░№╝ѕтюеТјбТхІтЎе№╝ѕDetectors№╝Ѕ>С╝ўтїќтЄйТЋ░№╝ѕMerit Functions№╝Ѕ>тЮЄтїђТђДТБђТхІтЎеСИІ№╝ѕUniformity Detector№╝ЅсђѓУ»ЦТјбТхІтЎеУЃйтцЪуаћуЕХтюеуЅ╣т«џСйЇуй«уџёуЅ╣т«џтї║тЪЪ№╝ѕтдѓую╝тіеУїЃтЏ┤№╝ЅуџёТефтљЉУЃйжЄЈт»єт║дтѕєтИЃсђѓ
ТќЄТАБС┐АТЂ»
ТІЊт▒ЋжўЁУ»╗
тЁЅТ│бт»╝т╗║ТеА
|
|
|
|
|
|
|
|
|
ТџѓТЌатЏътцЇ№╝їу▓ЙтйЕС╗јСйат╝ђтДІ№╝Ђ