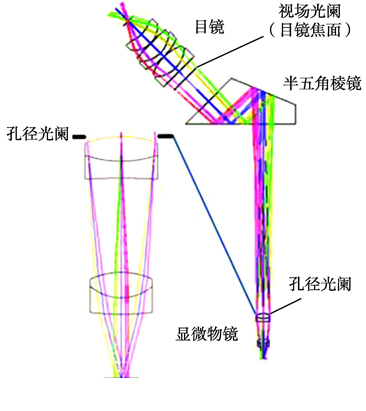
еҜји®әпјҡ зӣ®й•ңдёҚиғҪзӢ¬з«Ӣе·ҘдҪңпјҢжҖ»жҳҜе’Ңжҳҫеҫ®зү©й•ңжҲ–жңӣиҝңзү©й•ңз»“еҗҲе·ҘдҪңгҖӮ
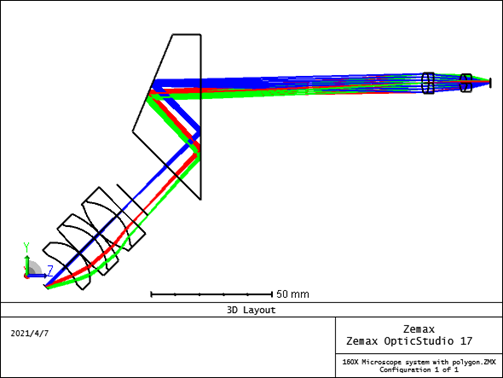
дёҠеӣҫжҳҜ16Xиүҫе°”еј—зӣ®й•ңе’Ң10XжқҺж–Ҝзү№жҳҫеҫ®зү©й•ңжһ„жҲҗзҡ„160Xжҳҫеҫ®й•ңзі»з»ҹзҡ„зӨәж„ҸеӣҫгҖӮ зү©й•ңе…үйҳ‘е°ұжҳҜзі»з»ҹзҡ„еӯ”еҫ„е…үйҳ‘пјҢдёҖиҲ¬дҪҚдәҺзү©й•ңеҗҺйғЁпјҢе®ғйҖҡиҝҮзӣ®й•ңеҸҚеҗ‘жҲҗеғҸпјҢеҪўжҲҗзі»з»ҹзҡ„е…ҘзһігҖӮ зӣ®й•ңзҡ„еҗҺз„ҰйқўдёҺзү©й•ңзҡ„еғҸйқўйҮҚеҗҲпјҢж Үжң¬йҰ–е…Ҳз»Ҹз”ұзү©й•ңж”ҫеӨ§10еҖҚдәҺзӣ®й•ңз„ҰйқўдёҠпјҢйҖҡиҝҮзӣ®й•ңеҶҚж”ҫеӨ§16еҖҚеҪўжҲҗиҷҡеғҸгҖӮзӣ®й•ңз„ҰйқўдёҠйҖҡеёёиҝҳжңүдёҖдёӘи§Ҷеңәе…үйҳ‘пјҢйҷҗе®ҡдәҶзӣ®й•ңи§Ҷеңәзҡ„еҗҢж—¶пјҢд№ҹйҷҗеҲ¶дәҶзү©й•ңи§ҶеңәеӨ§е°ҸгҖӮ 常规жҳҫеҫ®й•ңзӣ®й•ңеғҸйқўзӣҙеҫ„дёә15пҪһ20mmпјҢеҜ№еә”зҡ„ж Үжң¬и§Ҷеңәзӣҙеҫ„дёә1.5пҪһ2.0mmгҖӮ йҖҡеёёиҝҳдјҡз”ЁдёҖдёӘеҚҠдә”и§’жЈұй•ңпјҲhalf-penta prismпјүдҪҝзӣ®й•ңе‘Ҳ45В°еҖҫж–ңпјҢд»Ҙдҫҝи§ӮеҜҹгҖӮ и®ҫи®ЎжҢҮж Үпјҡ 16Xиүҫе°”еј—зӣ®й•ңе’Ң10XжқҺж–Ҝзү№жҳҫеҫ®зү©й•ңзҡ„жҠҖжңҜжҢҮж ҮеҰӮдёӢиЎЁпјҡ
е…үйҳ‘еңЁзү©й•ң第дёҖйқўгҖӮжіЁж„Ҹзү©й•ңзҡ„еғҸйқўзӣҙеҫ„2y`е’Ңзӣ®й•ңзҡ„еҗҺз„ҰйқўОҰдёҖиҮҙгҖӮдёҖиҲ¬йҖүжӢ©еҺҹеҲҷжҳҜпјҢзӣ®й•ңзҡ„еҗҺз„Ұйқўзӣҙеҫ„еә”еӨ§дәҺжҲ–зӯүдәҺзү©й•ңеғҸйқўзӣҙеҫ„пјҢеҚіОҰвүҘ2y`пјҢд№ҹе°ұжҳҜиҜҙпјҢйҖүжӢ©еҺҹеҲҷжҳҜд»Ҙзү©й•ңдёәдё»пјҢеҝ…иҰҒж—¶жӣҙжҚўзӣ®й•ңгҖӮ
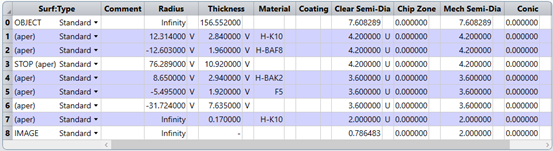
и®ҫи®ЎжөҒзЁӢпјҡ пјҲ1пјү и°ғеҮә10XжқҺж–Ҝзү№жҳҫеҫ®зү©й•ңзҡ„ж•°жҚ® LDEеҰӮдёӢеӣҫпјҡ
пјҲ2пјү дҝ®и®ўеӯ”еҫ„е’Ңи§Ҷеңә еӯ”еҫ„зұ»еһӢйңҖж”№дёәвҖңImage Space F/#вҖқпјҢ并и®ҫзҪ®дёә2.08гҖӮ
вҖңField TypeвҖқж”№дёәвҖңParaxial Image HeightвҖқпјҢжңҖеӨ§и§Ҷеңәдёә0.9mmпјҢ0.7и§Ҷеңәдёә0.63mmпјҢеҰӮдёӢеӣҫпјҡ
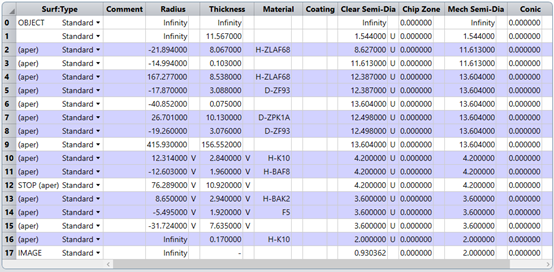
пјҲ3пјү ж·»еҠ 16Xиүҫе°”еј—зӣ®й•ң е°Ҷ16Xиүҫе°”еј—зӣ®й•ңзҡ„LDEж•°жҚ®еӨҚеҲ¶еҲ°10XжқҺж–Ҝзү№жҳҫеҫ®зү©й•ңд№ӢеүҚпјҢ并д»ӨT0=infгҖӮ жӯӨж—¶зҡ„LDEпјҢеҰӮдёӢеӣҫпјҡ
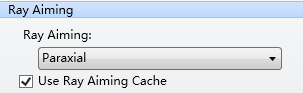
еңЁZEMAXдёӯпјҢжңүдёҖдёӘRay AimingпјҲе…үзәҝзһ„еҮҶпјүзҡ„еҠҹиғҪпјҢдёҖиҲ¬жҳҜoffзҠ¶жҖҒпјҢеңЁй•ҝзі»з»ҹдёӯпјҢеҸҜд»Ҙд»ӨRay aiming=ParaxialжҲ–RealпјҢе°ұеҸҜд»ҘдҝқиҜҒз»ҸиҝҮе…Ҙзһізҡ„дё»е…үзәҝд»Һе…үйҳ‘дёӯеҝғйҖҡиҝҮпјҢйҒҝе…Қе…үзәҝжәўеҮәгҖӮ
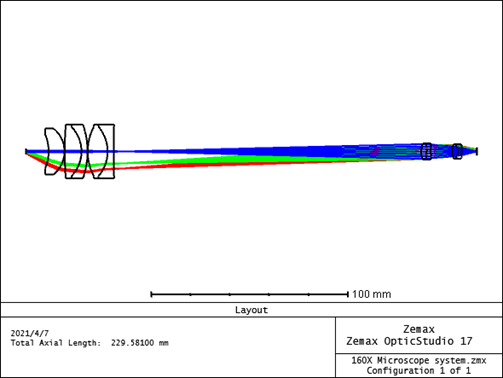
жӯӨж—¶пјҢеңЁиҝҷдёӘзі»з»ҹдёӯе®һйҷ…еӯҳеңЁдёӨеҘ—жҲҗеғҸзі»з»ҹпјҡдёҖеҘ—дёәж— йҷҗиҝңзҡ„е…үжқҹйҖҡиҝҮе…ҘзһігҖҒзӣ®й•ңгҖҒе…үйҳ‘е’Ңзү©й•ңжҲҗеғҸеңЁж Үжң¬дёҠпјҢзү©й•ңе’Ңзӣ®й•ңеҲҶеҲ«зӢ¬з«Ӣж ЎжӯЈдәҶеғҸе·®пјӣеҸҰдёҖеҘ—жҳҜе…үйҳ‘жҲҗеғҸпјҢеҚізү©й•ңдёҠзҡ„е…үйҳ‘еҸҚеҗ‘йҖҡиҝҮзӣ®й•ңеҪўжҲҗе…ҘзһіпјҢиҝҷдёӘжҲҗеғҸиҝҮзЁӢ并没жңүиҝӣиЎҢдјҳеҢ–пјҢеҸҜиғҪеӯҳеңЁеғҸе·®пјҢз§°дёәвҖңе…үйҳ‘еғҸе·®вҖқпјҢд№ҹе°ұжҳҜиҜҙпјҢйҖҡиҝҮе…Ҙзһізҡ„е…үжқҹ并жңӘе®Ңж•ҙең°йҖҡиҝҮзңҹжӯЈзҡ„е…үйҳ‘гҖӮ з”ұиӢҘе№ІдёӘйғЁд»¶жһ„жҲҗзҡ„иҫғй•ҝзі»з»ҹпјҢжҲ–дё»е…үзәҝи§’еәҰеҫҲеӨ§зҡ„е№ҝи§’зі»з»ҹпјҢе…үйҳ‘еғҸе·®еҫҖеҫҖеҪұе“Қи®ҫи®ЎпјҢеңЁйқһеёёзІҫеҜҶзҡ„зі»з»ҹи®ҫи®ЎдёӯпјҢдјҳеҢ–еғҸе·®зі»з»ҹж—¶иҰҒе…јйЎҫе…үйҳ‘еғҸе·®гҖӮ пјҲ4пјү 160Xжҳҫеҫ®й•ңзі»з»ҹзҡ„еҲқе§Ӣз»“жһ„ з»ҸиҝҮд»ҘдёҠзҡ„ж“ҚдҪңпјҢе°ұеҸҜд»Ҙеҫ—еҲ°160Xжҳҫеҫ®й•ңзі»з»ҹзҡ„еҲқе§Ӣз»“жһ„гҖӮ 2D Layoutпјҡ
иҝҷж ·пјҢзӣ®й•ңе’Ңжҳҫеҫ®зү©й•ңзҡ„з»ӯжҺҘеҸҜд»ҘеҲқжӯҘеҫ—еҲ°дёҖдёӘжҜ”иҫғжӯЈзЎ®зҡ„жҳҫеҫ®й•ңзі»з»ҹдәҶгҖӮ жӯӨж—¶пјҢе…Ҙзһіи·қLpвүҲ10.8mmпјҢдёҺеҺҹзӣ®й•ңеҸӮж•°дёҚеҗҢпјҲ11.6mmпјүпјҢиҝҷжҳҜеӣ дёәзү©й•ңзҡ„е…үйҳ‘пјҲд№ҹе°ұжҳҜзі»з»ҹе…үйҳ‘пјүз»ҸиҝҮзӣ®й•ңзҡ„еғҸе’Ңзӣ®й•ңеҺҹжқҘзҡ„е…ҘзһідҪҚзҪ®дёҚдёҖиҮҙгҖӮ е…Ҙзһізӣҙеҫ„и®Ўз®—еҰӮдёӢпјҡ
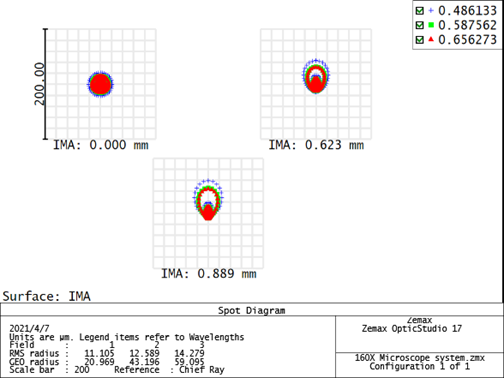
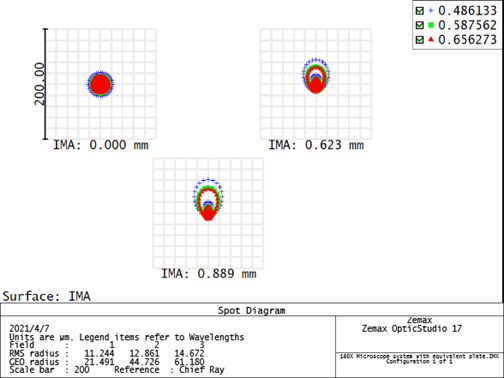
дёҠејҸдёӯпјҢNAдёәзү©й•ңзҡ„ж•°еҖјеӯ”еҫ„пјҢеҚіu`пјӣОІдёәзү©й•ңеҖҚзҺҮпјӣf`Eдёәзӣ®й•ңз„Ұи·қгҖӮ жӯӨж—¶зҡ„зӮ№еҲ—еӣҫпјҢеҰӮдёӢеӣҫ:
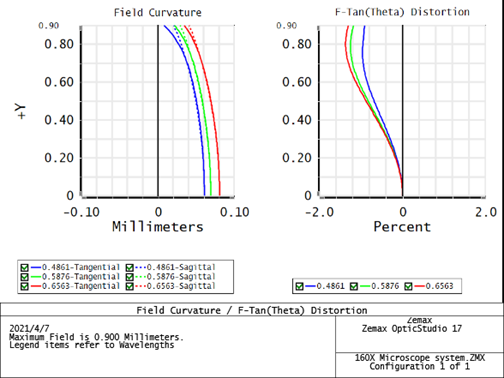
д»ҺзӮ№еҲ—еӣҫзңӢеҮәпјҢзӣ®й•ңе’Ңзү©й•ңзҡ„з®ҖеҚ•еҗҲжҲҗеҜ№жңҖз»ҲејҘж•Јж–‘еӨ§е°Ҹзҡ„еҪұе“ҚжҜ”иҫғе°ҸгҖӮ жҹҘзңӢз•ёеҸҳпјҢеҰӮдёӢеӣҫпјҡ
зі»з»ҹзҡ„з•ёеҸҳDTзәҰдёә-1.2%пјҢ并дёҚеӨӘеӨ§гҖӮз•ёеҸҳжҳҜз”ұзӣ®й•ңе’Ңзү©й•ңе…ұеҗҢеҶіе®ҡгҖӮ дёҖиҲ¬иҖҢиЁҖпјҢжҳҫеҫ®зү©й•ңдёәе°Ҹи§ҶеңәжҲҗеғҸзі»з»ҹпјҢз•ёеҸҳ并дёҚеӨ§пјҢзі»з»ҹзҡ„з•ёеҸҳдё»иҰҒз”ұзӣ®й•ңиҙЎзҢ®гҖӮ з”ұдәҺжҳҫеҫ®й•ңеӨ§йғҪз”ЁдәҺи§ӮеҜҹж Үжң¬пјҢеҜ№з•ёеҸҳиҰҒжұӮдёҚй«ҳгҖӮдҪҶжҳҜеҰӮжһңжҳҫеҫ®й•ңз”ЁдәҺжөӢйҮҸпјҢйӮЈе°ұиҰҒйҖүз”Ёе°Ҹз•ёеҸҳзҡ„зӣ®й•ңпјҢеҝ…иҰҒж—¶е°Ҷзӣ®й•ңе’Ңзү©й•ңеҗҲжҲҗеҗҺеҶҚдҝ®ж”№зӣ®й•ңеҸӮж•°жқҘеҮҸе°Ҹз•ёеҸҳгҖӮ
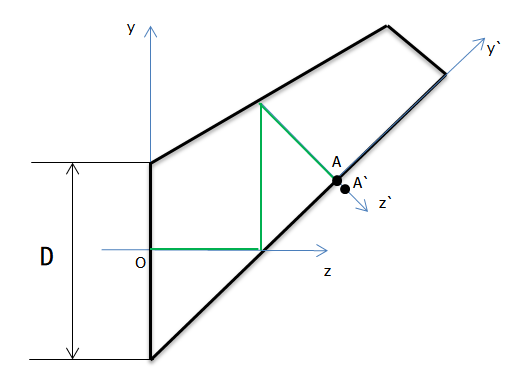
пјҲ5пјү еҠ е…ҘжЈұй•ңзӯүж•Ҳе№іжқҝ дёәдәҶж”№еҸҳе…үи·Ҝзҡ„ж–№еҗ‘жҲ–вҖңиҪ¬еғҸвҖқпјҢеёёеёёйңҖиҰҒеҠ е…ҘеҸҚе°„жЈұй•ңгҖӮ еңЁжҳҫеҫ®й•ңзі»з»ҹдёӯпјҢеёёеёёеҠ е…ҘдёҖдёӘеҚҠдә”и§’жЈұй•ңгҖӮжЈұй•ңзҡ„жқҗж–ҷйҖҡеёёдёәK9пјҢе…¶е…Ҙе°„йқўпјҲйқ иҝ‘зӣ®й•ңзҡ„йқўпјүдёә40mmГ—40mmзҡ„жӯЈж–№еҪўпјҢиҫ№й•ҝD=40mmпјҢжЈұй•ңеҶ…иҪҙдёҠе…үзәҝзҡ„й•ҝеәҰдёә
еңЁи®ҫи®Ўж—¶пјҢз”ЁдёҖдёӘK9пјҲH-K9Lпјүжқҗж–ҷзҡ„е№іжқҝжқҘзӯүж•ҲеҚҠдә”и§’жЈұй•ңпјҢе®ғеҜ№еә”з©әж°”дёӯзҡ„е…үи·Ҝй•ҝеәҰдёә
еңЁзі»з»ҹдёӯзҡ„еҗҲйҖӮдҪҚзҪ®еҠ е…ҘеҺҡеәҰдёәLзҡ„е№іжқҝпјҢзӣёеҪ“дәҺз©әж°”дёӯзҡ„й•ҝеәҰL0гҖӮ зү©й•ңзҡ„T0пјҲ=156.552mmпјүеҮҸеҺ»L0зҡ„й•ҝеәҰпјҢеҶҚеҗҲзҗҶеҲҶй…ҚеҲ°L1е’ҢL2дёӯеҺ»пјҢеҰӮдёӢеӣҫжүҖзӨәпјҡ
еҸ–L1=20mmпјҢеҲҷL2=156.552-45.04-20=91.512mmгҖӮ жӯӨж—¶зҡ„LDEпјҢеҰӮдёӢеӣҫпјҡ
第9-11иЎҢдёәж–°жҸ’е…Ҙзҡ„зӯүж•Ҳе№іжқҝгҖӮ з”ұдәҺе…үжқҹзҡ„еӯ”еҫ„е°ҸеҫҲе°ҸпјҢеңЁеҠ е…Ҙзӯүж•Ҳе№іжқҝеҗҺеғҸе·®еҸҳеҢ–дёҚеӨ§гҖӮеҝ…иҰҒж—¶пјҢйңҖиҰҒеёҰзқҖжЈұй•ңзӯүж•Ҳе№іжқҝдҝ®жӯЈзі»з»ҹзҡ„еғҸе·®гҖӮ жіЁж„Ҹзҡ„жҳҜпјҢжүҖжңүзҡ„дјҳеҢ–е°ҪйҮҸеңЁзӯүж•Ҳе№іжқҝзҡ„жғ…еҶөдёӢе®ҢжҲҗпјҢеӣ дёәдёҖдәӣж“ҚдҪңеңЁNon-SequentialзҠ¶жҖҒдёӢжҳҜдёҚиғҪдҪҝз”Ёзҡ„гҖӮ еҶҚж¬ЎжҹҘзңӢзӮ№еҲ—еӣҫпјҢеҰӮдёӢеӣҫпјҡ
д»ҺдёҠеӣҫзңӢеҮәпјҢеҠ е…Ҙзӯүж•Ҳе№іжқҝеҗҺпјҢејҘж•Јж–‘еӨ§е°Ҹзҡ„еҸҳеҢ–д№ҹеҫҲе°ҸгҖӮ пјҲ6пјү иҝҗз”ЁNon-Sequentialж“ҚдҪңеҠ е…ҘжЈұй•ң дёәдәҶжӣҙеҮҶзЎ®ең°жҳҫзӨәпјҢиҝҗз”ЁNon-Sequentialж“ҚдҪңжҸ’е…ҘеҚҠдә”и§’жЈұй•ңгҖӮ 1пјүи®ҫзҪ®еқҗж ҮиҪҙпјҡ еҚҠдә”и§’жЈұй•ңзҡ„еқҗж ҮеҸҳжҚўпјҢеҰӮдёӢеӣҫпјҡ
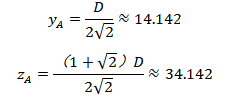
еҺҹзӮ№OдҪҚдәҺжЈұй•ң第дёҖйқўзҡ„е…үзәҝе…Ҙе°„еӨ„пјҢеқҗж ҮпјҲy,zпјү=(0,0)пјӣе…Ҙе°„йқўдёәжӯЈж–№еҪўпјҢиҫ№й•ҝдёәDпјҢеҸҜд»Ҙз®—еҮәеҮәе°„зӮ№Aзҡ„еқҗж Үдёә
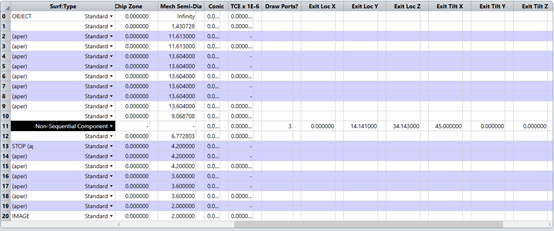
2пјүеңЁLDEдёӯжҸ’е…ҘNon-SequentialиЎҢ еңЁзӣ®й•ңеҗҺжҸ’е…ҘNon-SequentialиЎҢпјҢзӣёе…іеҸӮж•°и®ҫзҪ®еҰӮдёӢпјҡ
Non-Sequentialзҡ„и®ҫзҪ®дёӯпјҢеј•еҮәз«ҜеҸЈпјҲDraw Portsпјҹпјүдёә3пјҢеҮәеҸЈxеқҗж ҮпјҲExit Loc XпјүгҖҒеҮәеҸЈyеқҗж ҮпјҲExitLoc YпјүгҖҒеҮәеҸЈzеқҗж ҮпјҲExit Loc ZпјүиЎЁзӨәзҡ„жҳҜA`зҡ„еқҗж ҮпјҢиҜҘзӮ№дҪҚдәҺAиҝ‘ж—ҒжЈұй•ңеӨ–пјҢеҚіExitLoc Yз•Ҙе°ҸдәҺyAпјҢExit LocZз•ҘеӨ§дәҺzAгҖӮ Exit TiltиЎЁзӨәзҡ„жҳҜжЈұй•ңеј•иө·еқҗж ҮиҪҙзҡ„ж—ӢиҪ¬гҖӮ еңЁNon-Sequential ComponentEditorйҮҢи®ҫзҪ®еҚҠдә”и§’жЈұй•ңзҡ„еҸӮж•°пјҢеҰӮдёӢеӣҫпјҡ
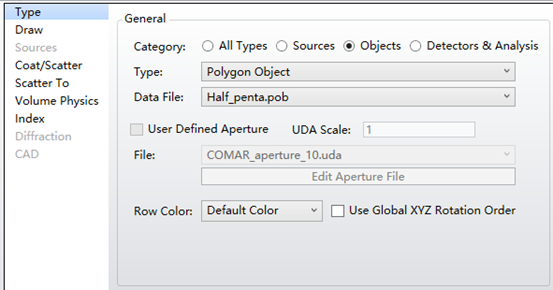
Object TypeпјҲзү©дҪ“зұ»еһӢпјүйҖүPolygonпјҲеӨҡйқўдҪ“пјүпјҢеңЁвҖңObject PropertiesвҖқдёӯзҡ„вҖңData FileвҖқйҖүжӢ©вҖңHalf-penta.POBвҖқпјҢеҰӮдёӢеӣҫпјҡ
ScaleпјҲзј©ж”ҫе°әеҜёпјүпјҢеҚіе…Ҙе°„йқўе°әеҜёдёәD/2=20гҖӮ жҹҘзңӢ3D LayoutпјҢеҰӮдёӢеӣҫпјҡ
йңҖиҰҒиҜҙжҳҺзҡ„жҳҜпјҢдҪҝз”ЁеҚҠдә”и§’жЈұй•ңзҡ„жҳҫеҫ®й•ңзі»з»ҹжүҖеҪўжҲҗзҡ„иҝҳжҳҜеҖ’еғҸпјҢд№ҹе°ұжҳҜиҜҙпјҢдҪҝз”ЁеҚҠдә”и§’жЈұй•ңиҷҪ然дҪҝи§ӮеҜҹж–№еҗ‘ж—ӢиҪ¬дәҶ45В°пјҢдҪҶдёҚиғҪиЎҘеҒҝжҳҫеҫ®зү©й•ңеҪўжҲҗзҡ„еҖ’еғҸгҖӮ
| ||||||||||||||||||||||||||||||||||

е®ҳж–№е…¬дј—еҸ·

е®ҳж–№е®ўжңҚ