激光器的简单原理
激光器的三个关键部件是增益介质(GainMedium)、泵浦源(Pump Source)和谐振器(Resonator)。
多光谱和高光谱的对比
多光谱技术
多光谱技术(Multispectral):是指能同时获取多个光学频谱波段(通常大于等于3个),并在可见光的基础上向红外光和紫外光两个方向扩展的光谱探测技术。常见实现方法是通过各种滤光片或分光器与多种感光胶片的组合,使其在同一时刻分别接收同一目标在不同窄光谱波段范围内辐射或反射的光信号,得到目标在几张不同光谱带的照片。 多光谱成像系统原理
多光谱成像系统原理包括棱镜分光、连续滤光片分光、全息分光、倾斜滤光片分光和分光光栅法等。
高光谱成像
高光谱成像(Hypespectral):是一种可以捕获和分析一片空间区域内逐点上光谱的精细技术,由于可以检测到单个对象不同空间位置上的独特光谱“特征”,因此可以检测到在视觉上无法区分的物质。 将紫外至红外光谱分为成百上千个通道,每个通道都能够拍摄一张照片。如此一来,我们获得的“照片”就不再是一张平面照片,而是一个“数据立方”。对这个“数据立方”可以进行多个维度的对比分析,从而获得常规照片难以得到的丰富信息,例如用来表征特定的物质组分、密度或应力分布等。这个过程就是“高光谱成像”。 “高光谱成像技术”首先是一种“成像”技术,在实现成像功能的前提下引入高光谱信息,增加了信息分析的维度,对物质组分等提供了定性或半定量分析手段。
电磁波的波谱
泊松亮斑
在19世纪初,有关光的波动学说其实已经得到了证明,因为在1807年托马斯.杨(ThomasYong)已经提出并做了双缝干涉实验,干涉现象已经表明了光的波动性。但是,当时还是有很多人是牛顿的光微粒学说的支持者,其中就有法国的数学家、工程师、物理学家泊松(Simeon Denis Poisson)。1818年,法国科学院搞了一个竞赛,题目就是让竞赛者证明光传播的特性以揭示光的本质。一个土木工程师菲涅尔(Augustin-Jean Fresnel )参加了这个竞赛并提交了他的光的波动学说的论文。这个竞赛的评委之一就是泊松,因为他是光粒子学说的支持者,他当然不喜欢菲涅尔的文章了,就试图研究他的理论并去否定他的理论。泊松利用自己极强的数学功底去验证菲涅尔的理论,后来他发现若是按照菲涅尔的理论,光通过一个圆形障碍物后在光轴上会存在一个亮点,这明显违背光的微粒学说,泊松认为这是明显的错误。但是,这个竞赛委员会的负责人阿拉戈决定通过实验验证菲涅尔的理论,他让蜡烛发出的光经过贴在玻璃板上的2mm的金属磁盘,最后,他们实验观察到了亮斑,证明了菲涅尔的理论,同时,也再次证明了光的波动性。由于这个亮斑是泊松首先计算出来的,后人就把它称为“泊松亮斑”。
双目测距的基本原理
P为待测物体上的某一点,Ol和Or分别为两个相机的光心,T是Baseline(中心距或基线),f是相机的焦距;Z为需要求得的深度信息,可以由上图中的公式计算得到。 双目测距分4个步骤:相机标定——双目校正——双目匹配——深度计算。 相机标定:摄像头由于光学透镜的特性使得成像存在着径向畸变,可由三个参数k1,K2,k3确定;由于装配方面的误差,传感器与光学镜头并非完全平行,因此成像存在切向畸变,可由两个参数p1,p2确定。单个摄像头的定标主要是计算出摄像头的内参(焦距和成像原点y、五个畸变参数(一般只需要计算出k1,k2,p1,p2,对于鱼眼镜头等径向畸变特别大的才需要计算k3)以及外参(标定物的世界坐标。而双目摄像头定标不仅要得出每个摄像头的内部参数,还需要通过标定来测量两个摄像头之间的相对位置(即右摄像头相对于左摄像头的旋转矩阵R、平移向量t)。 双目校正:双目校正是根据摄像头定标后获得的单目内参数据(焦距、成像原点、畸变系数)和双目相对位置关系(旋转矩阵和平移向量),分别对左右视图进行消除畸变和行对准,使得左右视图的成像原点坐标一致、两摄像头光轴平行、左右成像平面共面、对极线行对齐。这样一幅图像上任意一点与其在另一幅图像上的对应点就必然具有相同的行号,只需在该行进行一维搜索即可匹配到对应点。 双目匹配:双目匹配的作用是把同一场景在左右视图上对应的像点匹配起来,这样做的目的是为了得到视差图。双目匹配被普遍认为是立体视觉中最困难也是最关键的问题。 深度计算:得到视差数据,通过上述原理中的公式就可以很容易的计算出深度信息。 结构光测距的基本原理
O为待测物体上的某一点,b是Baseline(基线,即Projector和Camera的中心距),f是相机的焦距;Z0为参考(标定)平面的距离,Z为需要求得的深度信息,可以由上图中的公式计算得到。
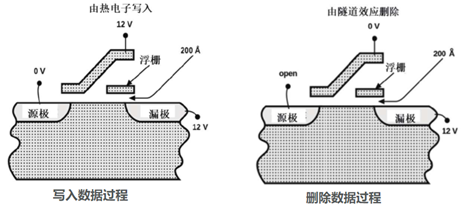
半导体存储器的基本原理
写入数据。NMOS闪存的初始状态为关闭状态,浮栅上没有电荷。写入数据时,栅极(字线)和漏极(位线)加正高压,NMOS导通,产生热电子。因为栅极的高压被耦合到浮栅,热电子由隧道效应进入浮栅,热电子的能量很高,这一过程很快,通常在微秒(us)以下。写入过程结束后,浮栅上有很多电子负电荷。此时的NMOS闪存处于强关闭状态。 读取数据。在栅极(字线)和漏极(位线)加正低压。若NMOS处于状态1,即数据被写入,NMOS为关闭状态。若NMOS处于状态0,即数据被删除,NMOS为导通状态。 删除数据。栅极(字线)和源极(位线)接地,漏极加正高压。因为浮栅极的电子因FN隧道效应进入漏极,此过程比写入时要慢得多,通常为毫秒(ms)量级。删除过程结束后,浮栅上留下的是空穴正电荷。此时的NMOS闪存处于强导通状态。 对于存储器来说,最重要的指标是它的容量、读写和删除数据的数度。
阿贝折射率仪的工作原理
如果折射介质的折射率是已知的,则可通过测量入射角和折射角的大小求得入射介质的折射率。根据上述原理,人们发明了多种折射率仪来测量矿物的折射率。在岩相学中,最常用的是阿贝折射率仪,其光学主件为高折射率的玻璃棱镜、读数望远镜,用于准确测定玻璃棱镜的全反射临界角,然后根据玻璃棱镜的已知折射率换算并显示出矿物的折射率。 在岩石中,绝大部分透明矿物的折射率在1.4~2.0之间。透明矿物的折射率越大,其全射临界角越小,则全反射的光线越多,往往显得比较明亮。
|

官方公众号

官方客服